

Adaptive Sliding Mode Control Method for Servo System Based on Extended State Observer
An adaptive sliding mode, expansion state technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as chattering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0089] The present invention will be further described below in conjunction with the accompanying drawings.
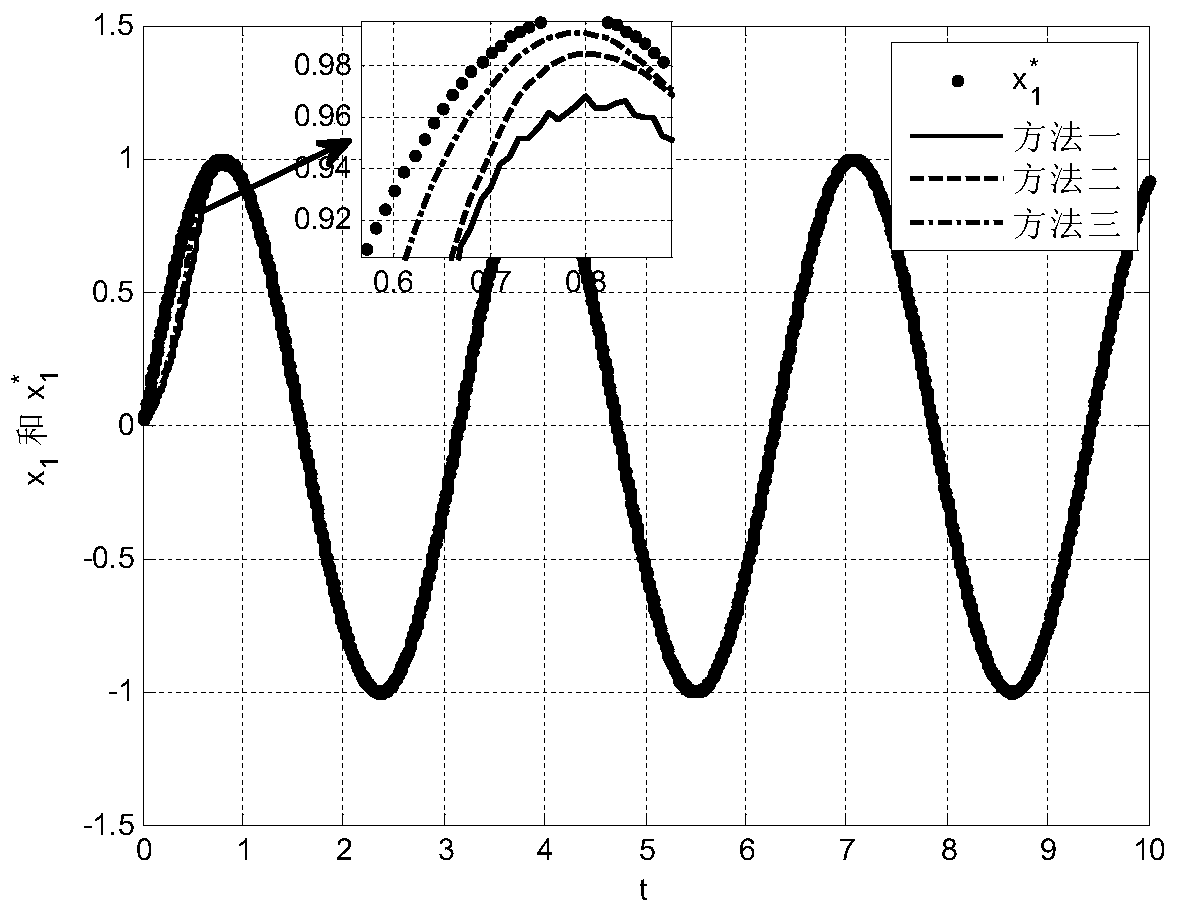
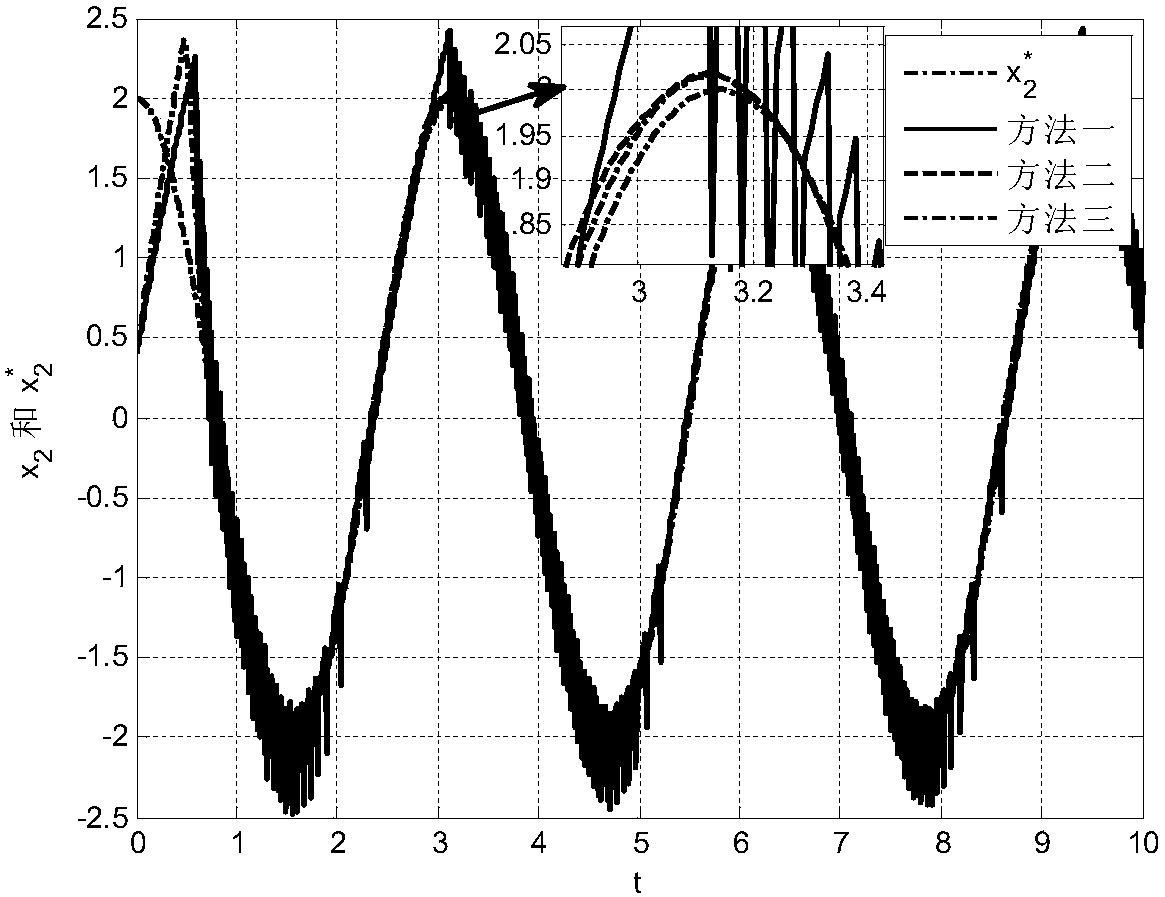
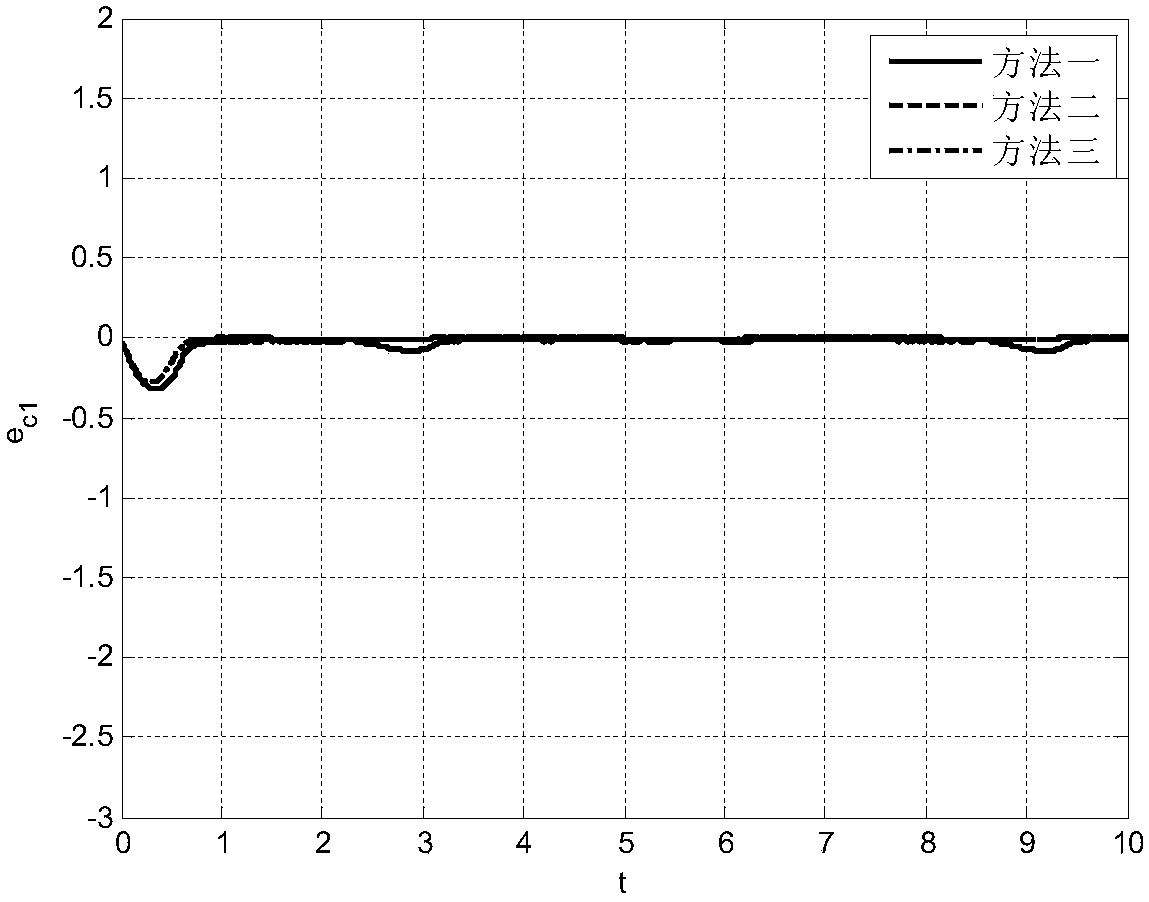
[0090] Referring to Figure 1- Figure 9 , an adaptive sliding mode control method for servo systems based on extended state observers, including the following steps:
[0091] Step 1, establish the servo system model shown in formula (1), initialize the system state and control parameters;
[0092]
[0093]
[0094] Step 2, performing approximate processing on the saturation limiting link;
[0095] 2.1, using the hyperbolic tangent function, sat(u) can be approximated as
[0096]
[0097] Then, v(u)=sat(u) is equivalent to
[0098] v(u)=sat(u)=g(u)+d_1(u) (3)
[0099] Among them, d_1(u)=sat(u)-g(u), and d_1(u) satisfies
[0100] |d_1(u)|≤D (4)
[0101] Among them, |d_1(u)|=|sat(u)-g(u)|, D is the maximum value of d_1(u), D=v max (1-tanh(1));
[0102] 2.2, according to the Lagrange median value theorem, there is a constant ξ, 0<ξ<1, so that
[0103] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More