Lycium barbarum picking robot and control method thereof
A technology for picking robots and control methods, which is applied in the field of wolfberry picking robots, can solve the problems of fruit and vegetable picking robots with complex systems and structures, lack of versatility of robots, and low picking efficiency, so as to ensure implementability, easy maintenance, and anti-interference ability strong effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be further described in detail below with reference to the accompanying drawings, which is an explanation rather than a limitation of the present invention.
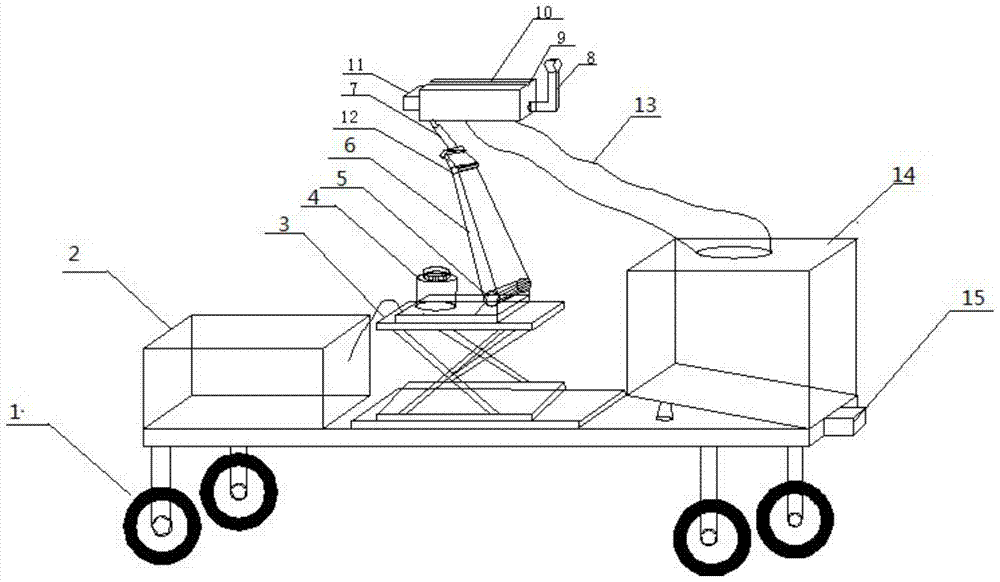
[0062] Such as figure 1 As shown, a wolfberry picking robot of the present invention includes a trolley 1; one end of the trolley 1 is provided with a power supply and power control device 2, and the other end is provided with a road barrier sensor 15, and the upper part is also provided with a mechanical arm. The mechanical arm includes a lifting platform 3, a waist rotation joint, a large arm 6, a forearm 7 and a prismatic joint connected in sequence. The lifting platform 3 is provided with a waist motor 4, a large arm 6 and a large arm electric motor 5; the upper end of the large arm 6 and The forearm 7 is connected, and the upper end of the forearm 7 is connected with the picking head 9 through a prismatic joint. The forearm motor 12 is arranged at the bottom of the forearm 7; the waist...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More