

Cooperated tracking control method of time-lag non-linear multi-agent systems
A multi-agent system, time-delay nonlinear technology, applied in three-dimensional position/channel control and other directions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
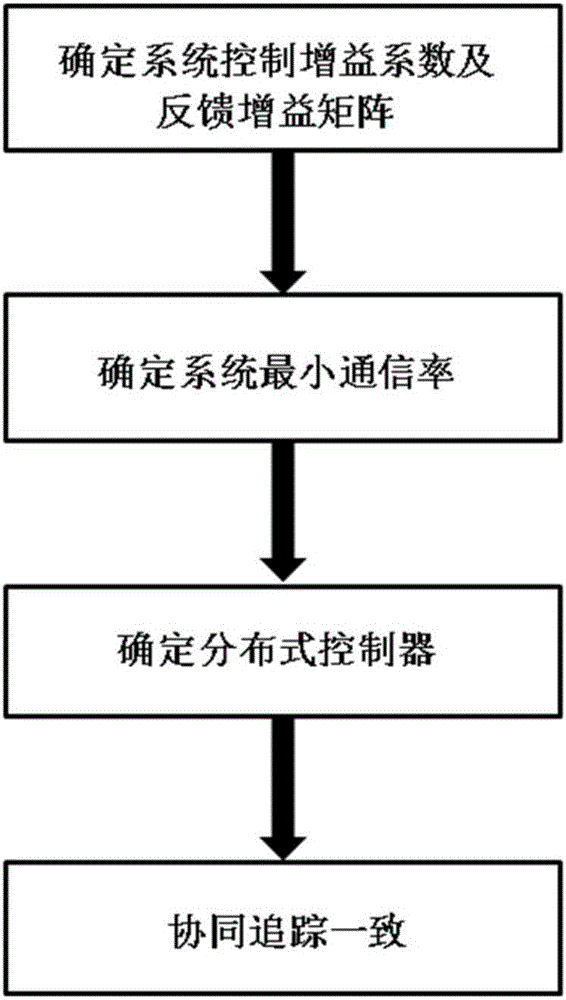
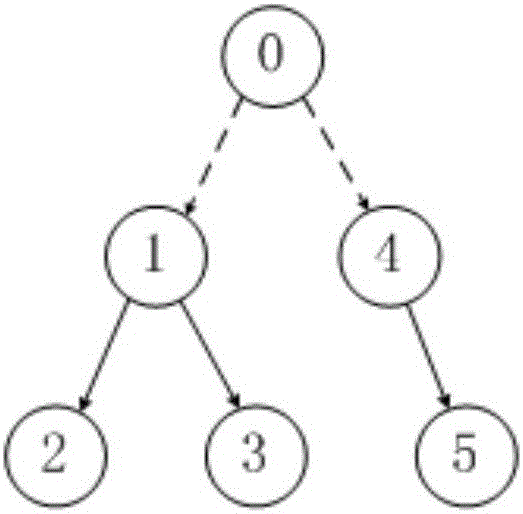
[0042] The present invention considers a nonlinear multi-agent system composed of a leader and N followers, and by designing a distributed controller, the state of the N followers finally approaches the state of the leader.
[0043] For followers, the dynamic model of the i-th follower is
[0044] x · i ( t ) = Ax i ( t ) + C f ( x i ( t ) ) + D f ( x i ( t - ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More