

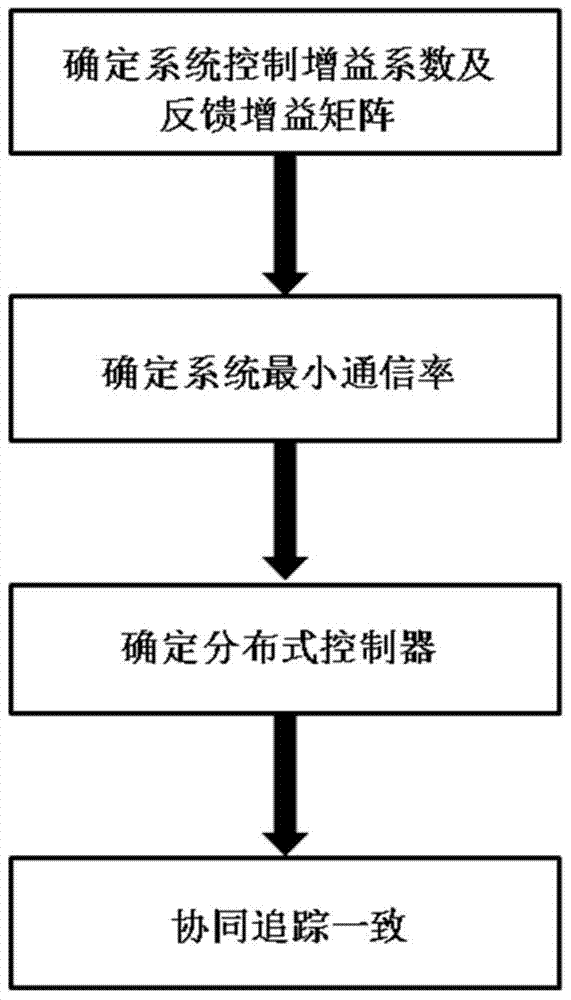
A cooperative tracking control method for time-delay nonlinear multi-agent systems
A multi-agent system, time-delay nonlinear technology, applied in three-dimensional position/channel control and other directions, to achieve the effect of strong practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
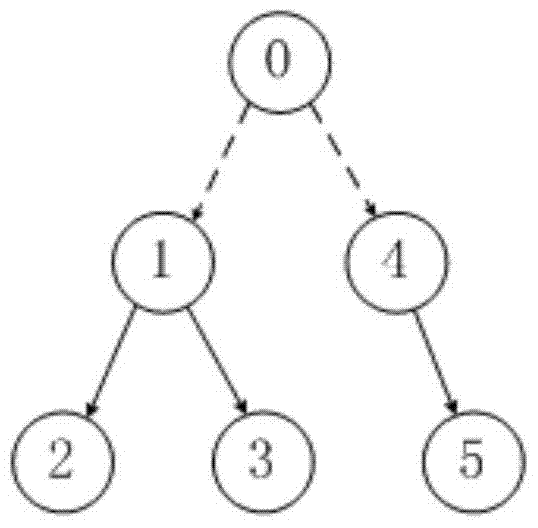
[0042] The present invention considers a nonlinear multi-agent system composed of a leader and N followers, and by designing a distributed controller, the state of the N followers finally approaches the state of the leader.
[0043] For followers, the dynamic model of the i-th follower is
[0044]
[0045] in is the n-dimensional state vector, is the set of real numbers; is its nonlinear dynamic function; τ(t) is the unknown time delay; u i (t) is the control input; is the known system matrix.
[0046] The dynamic model of the navigator is
[0047]
[0048] in It is the navigator state variable. The leader in the present invention can be used as an external system or a control generator, which can generate the required state trajectory, and the leader will not be affected by the follower, but only provides the followe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More