

Method and device for image prediction
A technology for predicting direction and image, applied in image communication, digital video signal modification, electrical components and other directions, which can solve the problems of unable to improve coding efficiency, unable to guarantee the accuracy of motion vector information of adjacent blocks, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1210
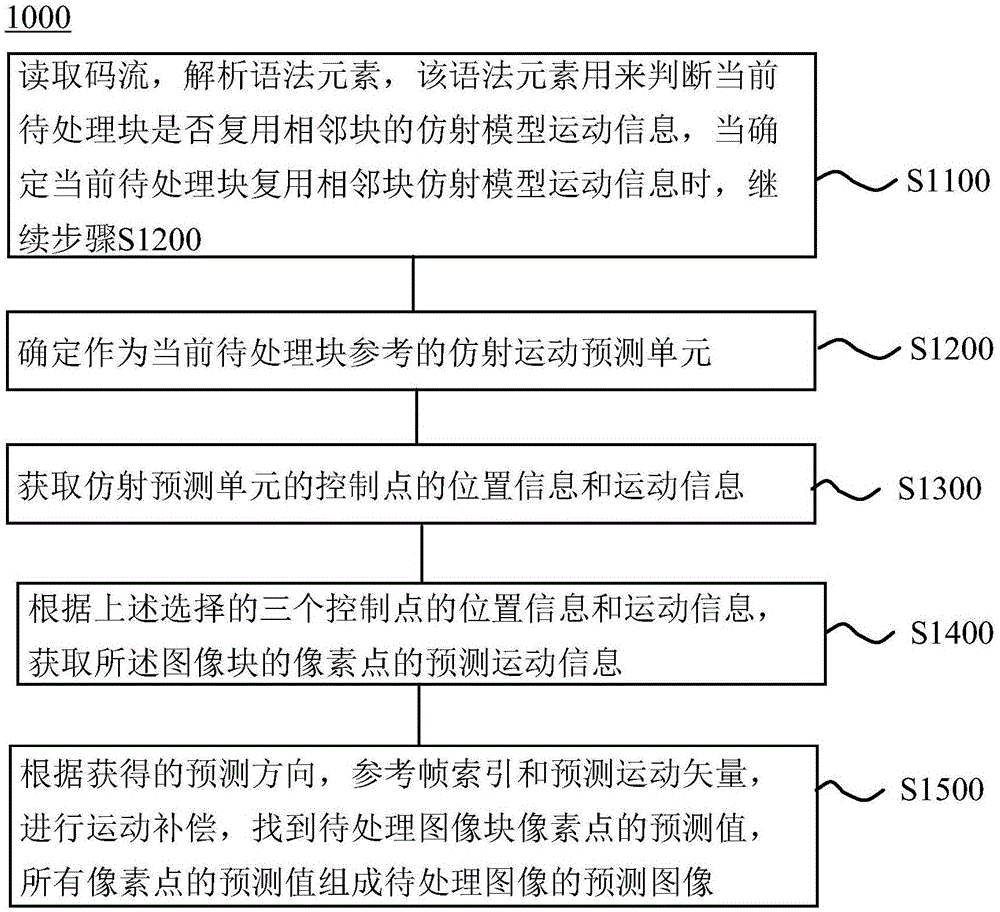
[0144] The first specific implementation method 1210 of this step includes:
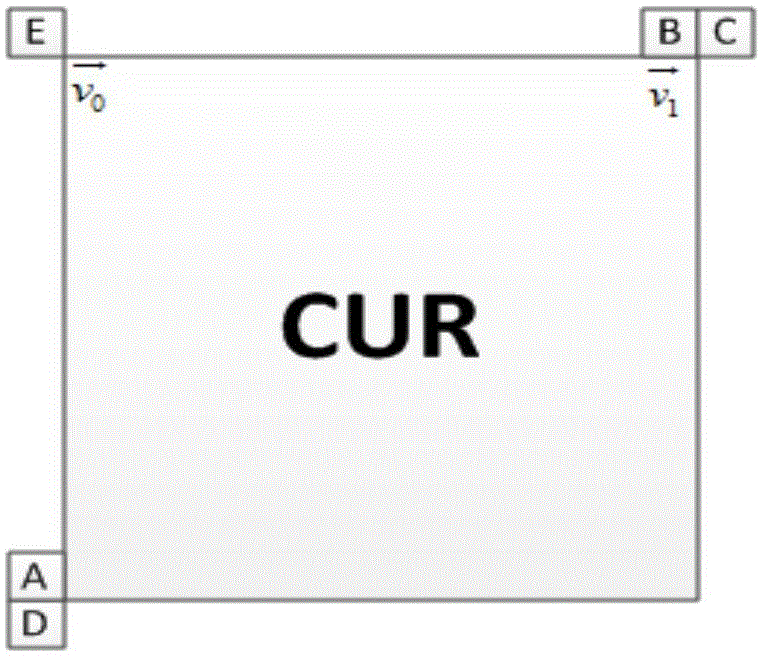
[0145] S1211: Determine a set of candidate prediction units of the current block to be processed.
[0146] Such as figure 2 As shown, in the embodiment of the present invention, the prediction units where the 4x4 blocks at the five positions A, B, C, D, and E are adjacent to each other in space of the current block to be processed are selected to form a set. It should be understood that A, B, C can also be selected For several positions in D, E, the prediction units where other time-domain neighboring blocks are located can also be selected to form a set, which is not limited.
[0147] S1212: Check whether the prediction unit in the set is an affine motion prediction unit in a preset order.
[0148] Among them, the preset sequence is the sequence predetermined by the encoding and decoding ends through protocols and the encoding and decoding ends are consistent. In the embodiment of the present invention, th...
Embodiment approach 1220
[0150] The second specific implementation method 1220 of this step includes:
[0151] S1221: Determine a set of candidate prediction units of the current block to be processed.
[0152] In addition to the same set determination method as S1211, it may also include moving the non-affine prediction unit blocks in the above set out of the set. For example, the set determined by the determination method of S1211 is the prediction where A, B, C, D, and E are located. If the prediction unit where C and D are located is not an affine prediction unit, then C and D are removed from the set, and the determined candidate prediction unit set is the prediction unit where A, B, and E are located.
[0153] It can also include limiting the capacity of the set and removing candidate prediction units whose check order is outside the allowable number out of the set, for example, limiting the set to a maximum of 2 candidate prediction units, the set determined by the determination method of S1211 and th...
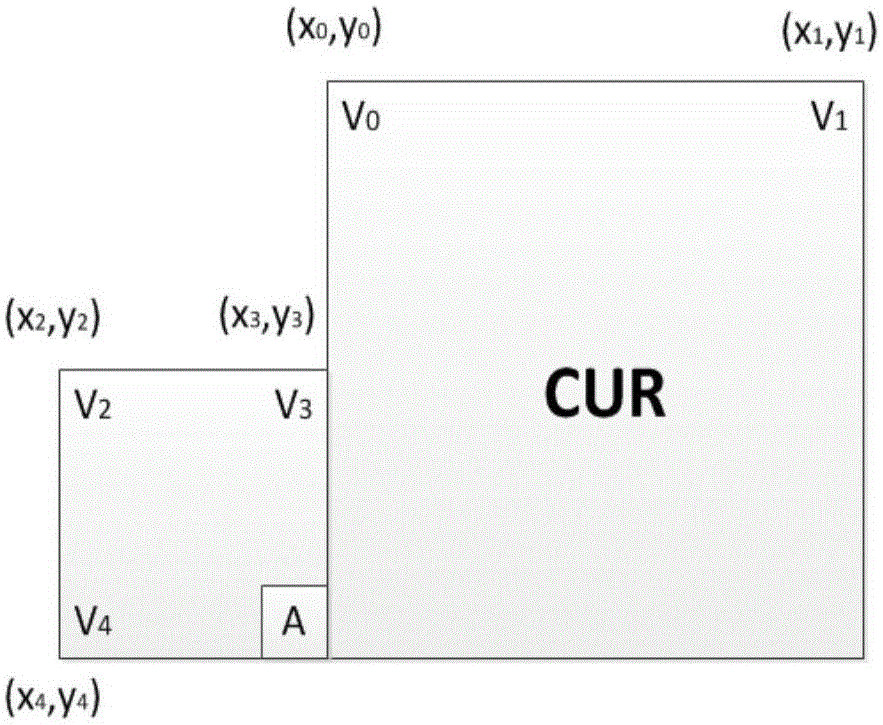
Embodiment approach 1310
[0159] The first specific implementation method 1310 of this step includes: randomly selecting three control points from the four control points of the affine prediction unit, and obtaining their position information, motion vector information, prediction direction and reference frame index. All pixels of the same affine prediction unit have the same prediction direction and reference frame index, so the prediction direction and reference frame index of all control points are also the same.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More