

Controllable variable stiffness leg based on magnetorheology
A variable stiffness, magnetorheological technology, applied in the field of intelligent robots, can solve problems such as complex mechanical structure, and achieve the effect of simplifying mechanical structure, easy replacement, and simple control strategy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be described in further detail below in conjunction with the accompanying drawings.
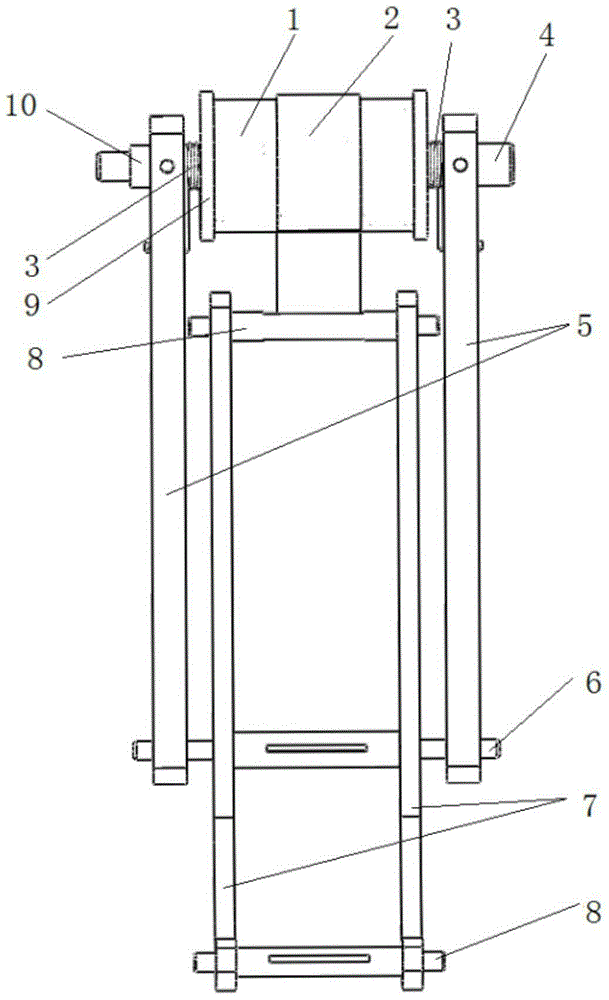
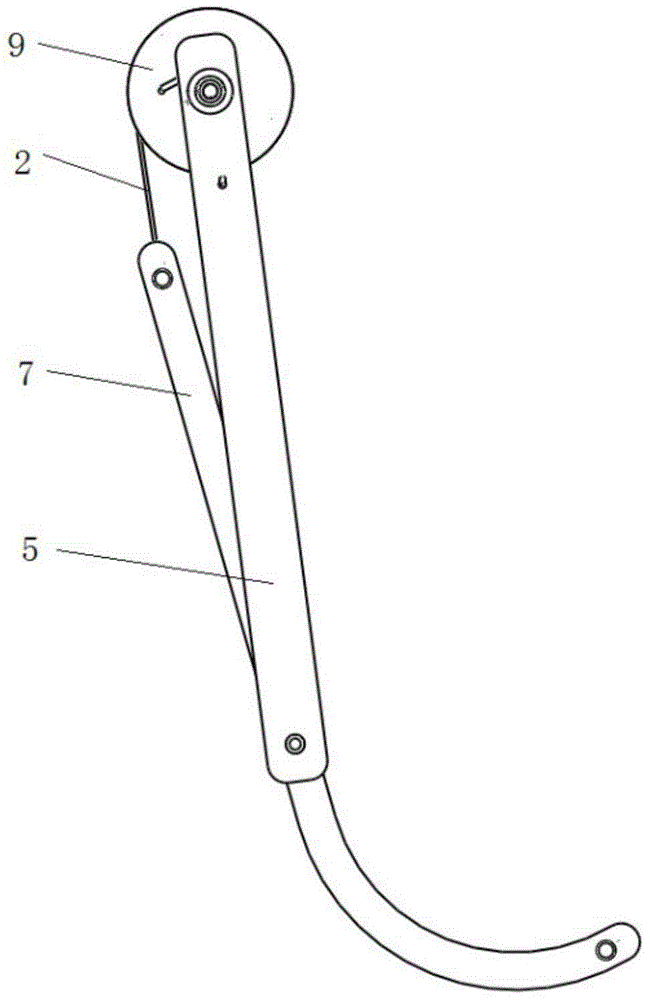
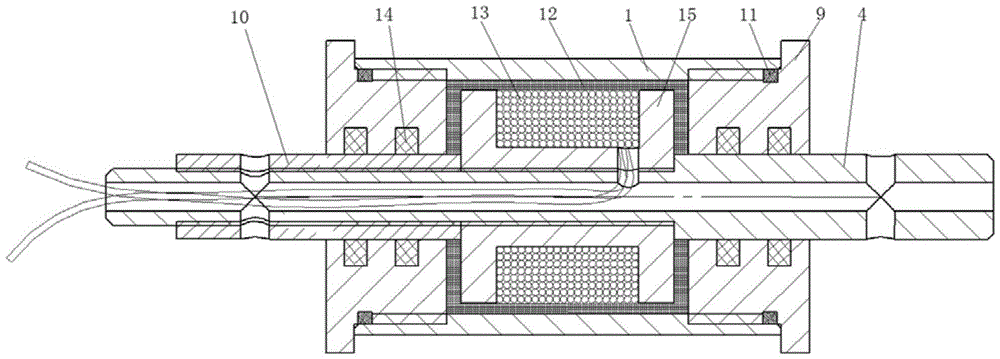
[0029] Such as Figure 1a As shown, a kind of controllable variable stiffness leg based on magnetorheological fluid of the present invention is composed of magnetorheological damping module (such as figure 2 Sectional view), left and right two torsion springs 3, leg support rod 5, foot support rod 7, central rod 6, connecting rod 8, connecting band 2 and some gaskets, nuts (not drawn) form. Such as image 3 As shown in the sectional view, the magneto-rheological damping module consists of an internal valve core 15, an external sleeve 1, sealing end caps 9 at both ends, an excitation coil 13, a right support rod 4, a left support rod 10, an o-ring 11, and a shaft The sealing ring 14 and the magnetorheological fluid 12 are composed. The spool 15 is threadedly connected with the right support rod 4, and is positioned between the right support rod shafts. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More