

Multimodal flight conversion control method for hybrid layout rotary-wing unmanned aerial vehicle
A mode conversion, unmanned rotor technology, applied in the direction of flight direction control, rotorcraft, aircraft control, etc., can solve the problem that the rotorcraft cannot fly at high speed, does not have vertical take-off and landing ability and hovering ability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be described in detail below in conjunction with the drawings and embodiments.
[0031] The present invention provides a multi-modal flight conversion control method for a hybrid layout rotary wing drone. The hybrid layout rotary wing drone adopts a tip jet drive / rotor / fixed wing hybrid layout. The hybrid layout Rotor UAV includes: fixed-wing aircraft body, drive / rotor rotor system, propulsion aero engine and flight control system, see patent reference [1]: application number 201410852017.X, invention name: a composite multi-mode The present invention is based on the compound multi-mode multi-purpose aircraft.
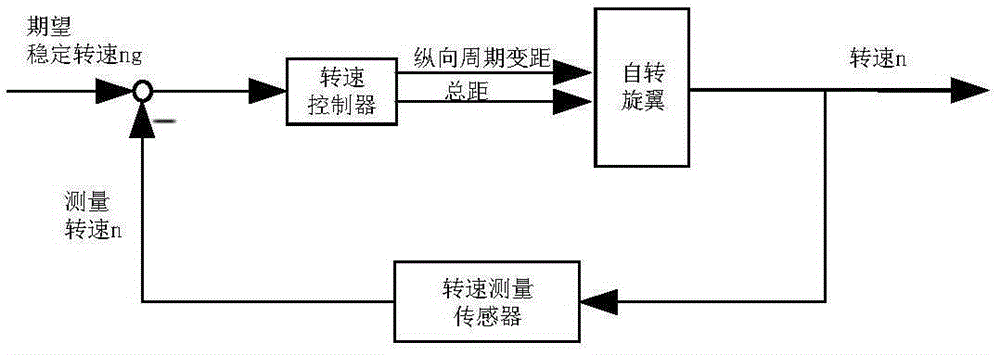
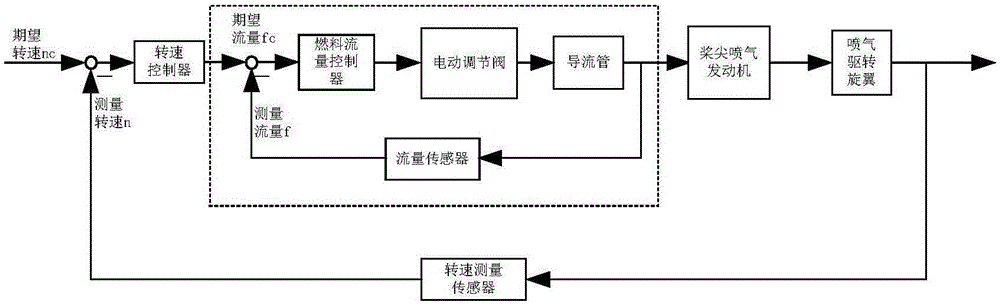
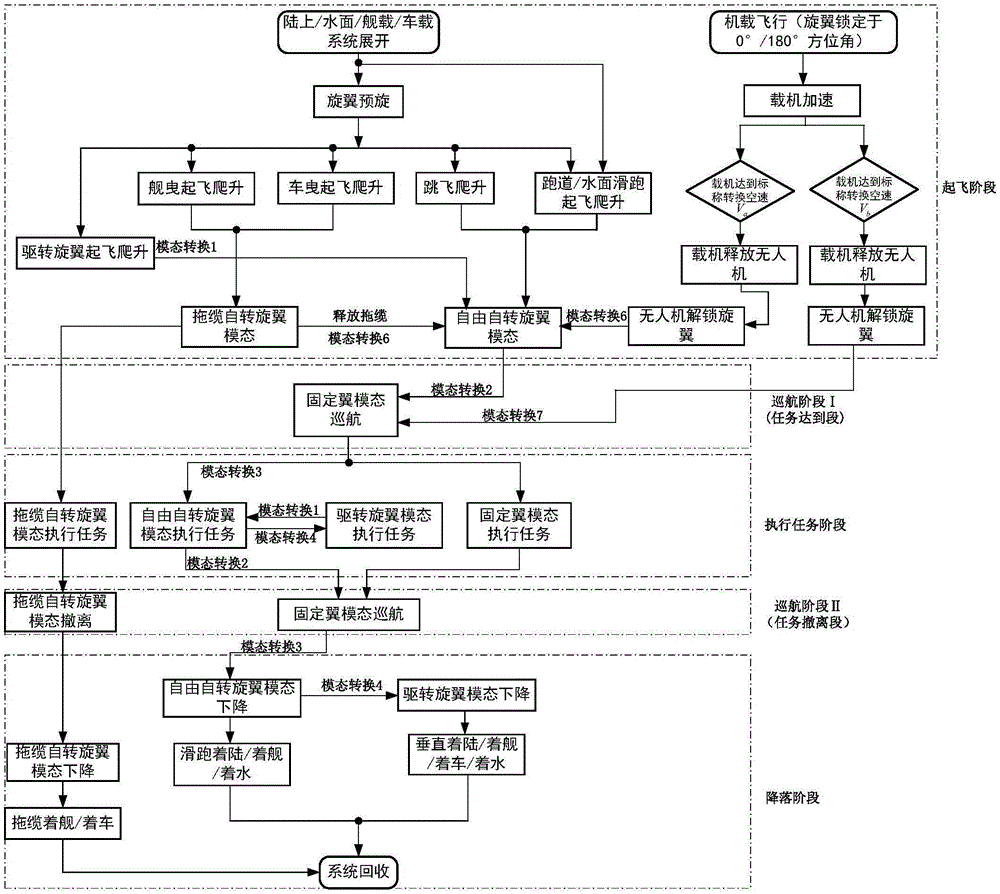
[0032] The hybrid layout rotor UAV adopts a composite layout based on tip jet driving / rotating rotor / fixed wing. According to the driving mode and speed range of the rotor, the following three flight modes can be realized: tip jet driving Rotor wing mode, autorotor wing mode and fixed wing mode. In addition, if the parent aircraft launch m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More