

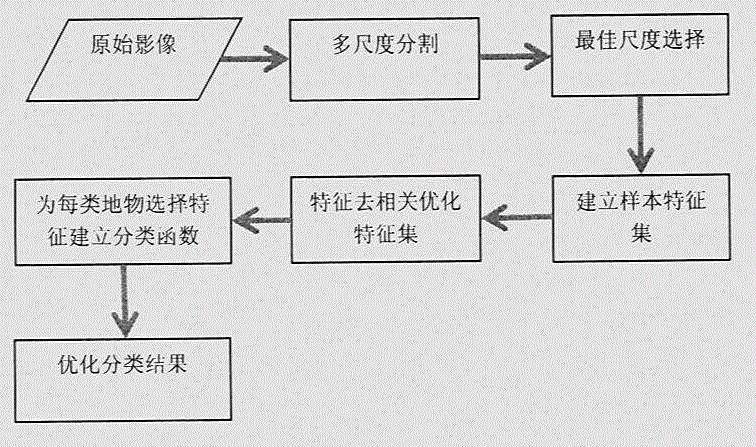
Open-pit mine typical ground object classification method based on UAV image
A technology for surface feature classification and open-pit mines, which is applied to computer parts, instruments, character and pattern recognition, etc., can solve the problem that the difference between ground features is not obvious, the classification method is not very universal, and the complexity of mine features is strong to achieve high-precision classification, improve efficiency and classification accuracy, and avoid misclassification and incomplete ground objects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
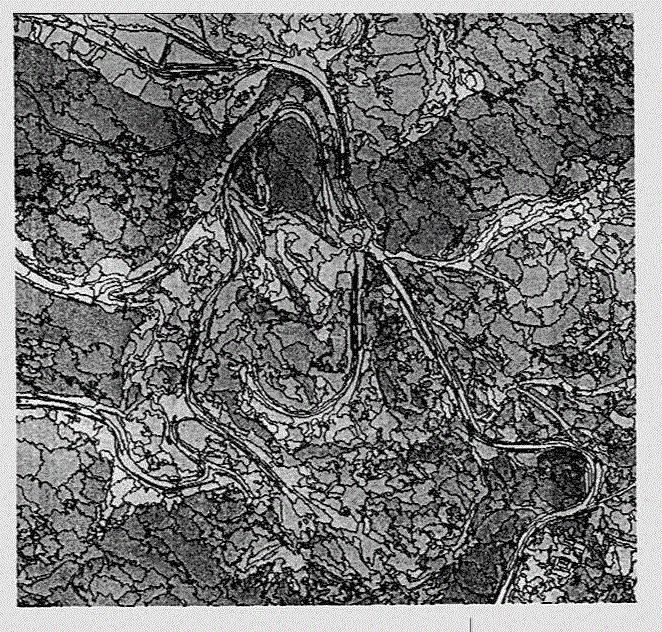
[0037] Taking the UAV aerial image of an open-pit mine in August 2014 as the data source, an experiment of the invention's method for classifying typical surface features in an open-pit mine based on UAV images was carried out. The original image of the experimental area is as figure 2 shown.
[0038] A) First, multi-scale segmentation is performed on the image, and the segmentation scales are respectively set to 80, 100, 130, 150, 200, and 250. The resulting segmentation results are shown in Figure 3, and the segmentation results of different segmentation scales are compared from the segmentation results It can be found that when the scale parameter is set to 80, the area of the segmented object is small, and the segmentation of the ground object is too fine, which is not conducive to the complete extraction of the ground feature; when the scale parameter is set to 100, 130, the segmentation effect on the road Better, it divides the road into small objects very well, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More