

Air-ground amphibious emergent rescue investigation robot and purposes of same
An emergency rescue and robot technology, applied in the field of safety production monitoring and emergency rescue, can solve problems such as accident expansion, low resolution of video data, and singleness, and achieve the effect of improving the efficiency of accident monitoring and rescue.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described in detail below in combination with specific embodiments.
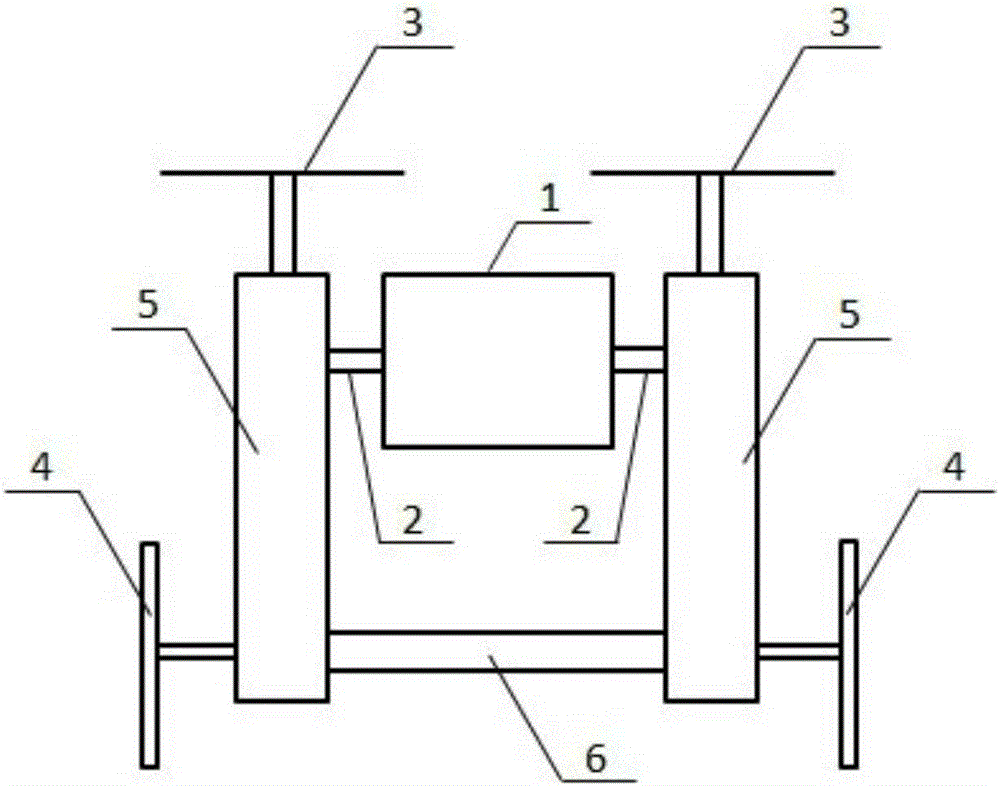
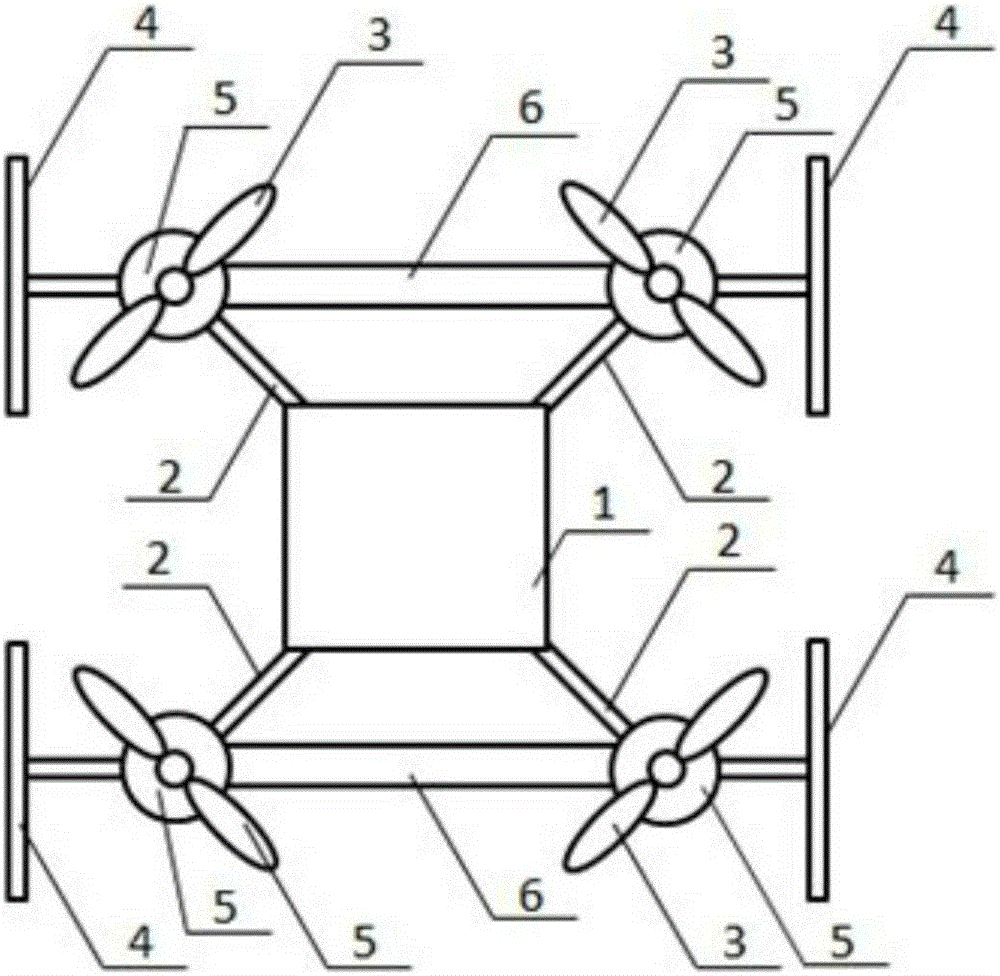
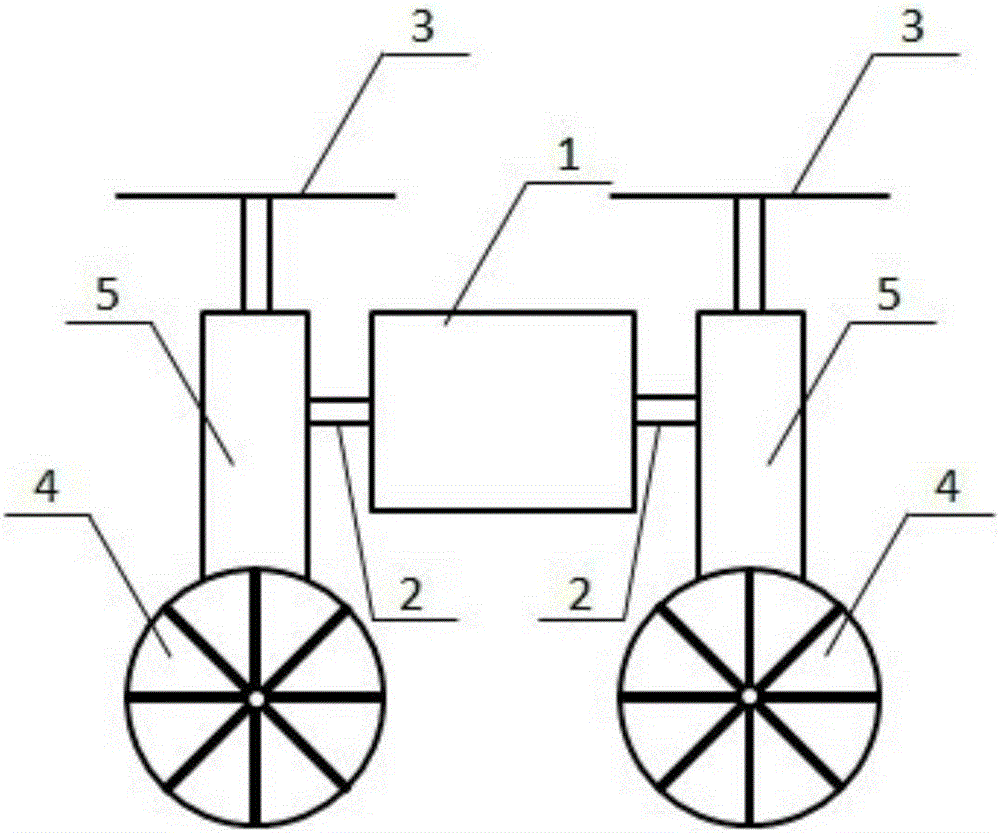
[0019] refer to Figure 1-3 As shown, the land-air amphibious emergency rescue and investigation robot mainly includes a fuselage 1, an arm 2, a rotor 3, a ground crawling wheel 4, a motor and transmission shaft protection shell 5, a wheel shaft protection shell 6 and a ground controller.
[0020] The fuselage 1 includes a flight controller, an electronic governor, a GPS system, a communication system, an acquisition system, a dangerous gas monitor, and a battery. Such as Figure 4 As shown, the flight controller is connected to the electronic governor, and the motor is connected to the electronic governor and the transmission system at the same time. The transmission system is connected to the wheel shaft and the rotor, and can switch between the rotor and the wheel shaft. The flight controller sends instructions to the electronic governor to adjust the motor s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More