

Robot indoor positioning and navigation method based on single vision
An indoor positioning and navigation method technology, applied in two-dimensional position/channel control, navigation, surveying and mapping and navigation, etc., can solve the problems of very high environmental requirements, reduced environmental adaptability, and high cost of robots, so as to ensure The effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The technical scheme of the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
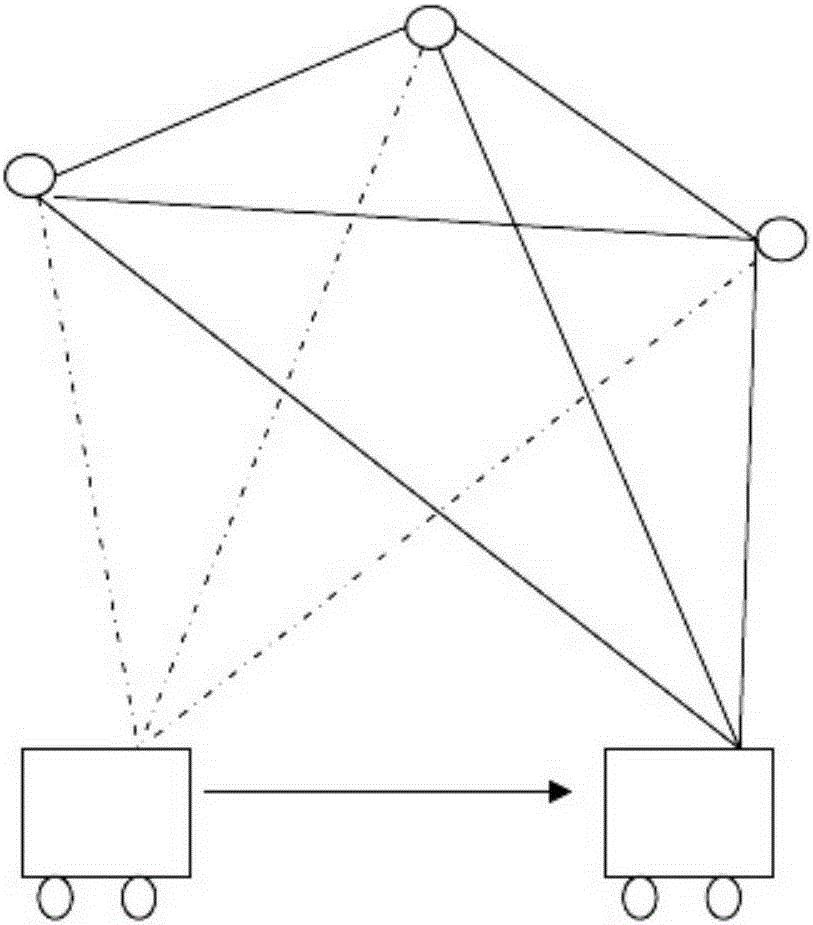
[0027] A method for indoor positioning and navigation of a robot based on monovision, in which the robot is equipped with a monocular camera, an electronic compass and a sonar sensor, and three identifiable marking points are set on the indoor roof, such as figure 1 As shown, in order to facilitate the realization and installation of robot positioning, navigation and path planning functions, the functions of robot positioning, navigation and path planning are realized through the monocular camera and three identifiable marking points (or labels) on the roof.
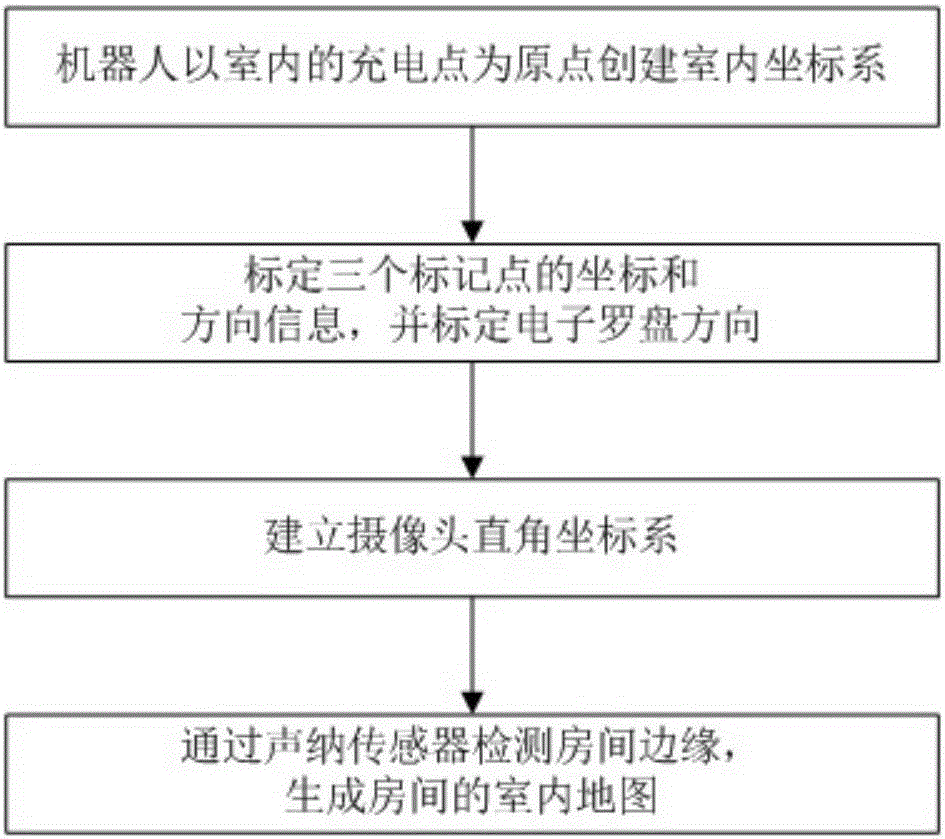
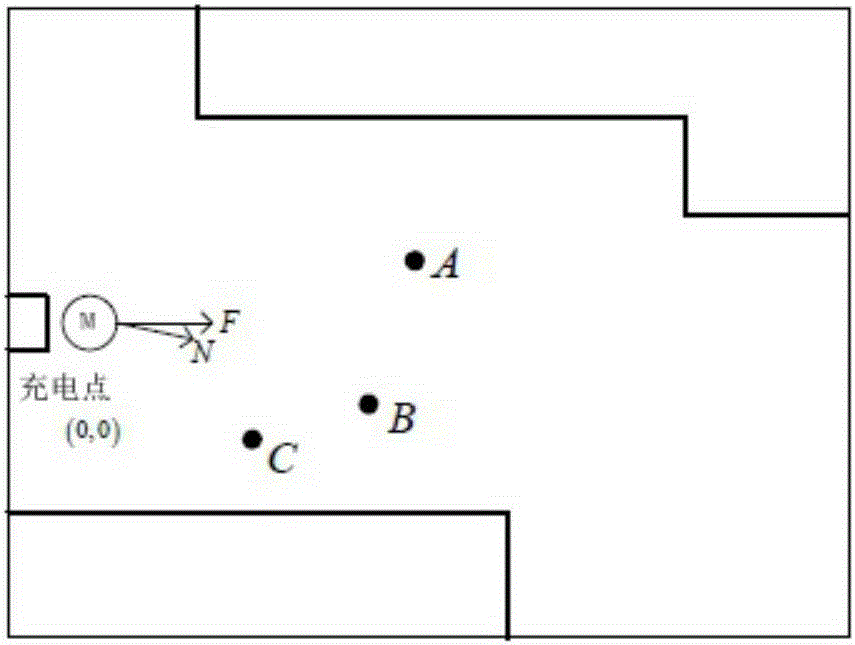
[0028] Among them, when using for the first time, you need to create an indoor map of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More