Nonlinear non-Gaussian ranking filtering method for Martian atmosphere entering section
An entry-level, nonlinear technology, applied in the field of aerospace navigation, can solve problems such as difficult dynamic models, complex aerodynamic environments, and navigation errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
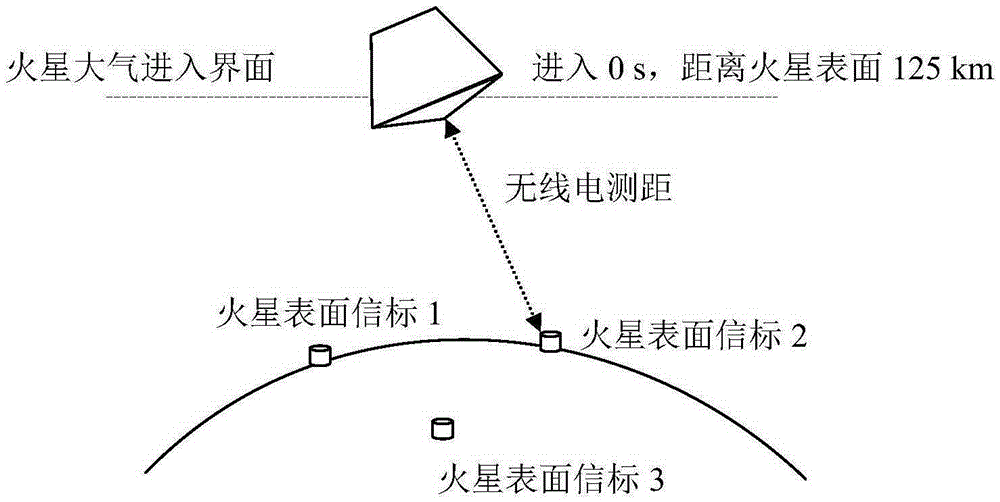
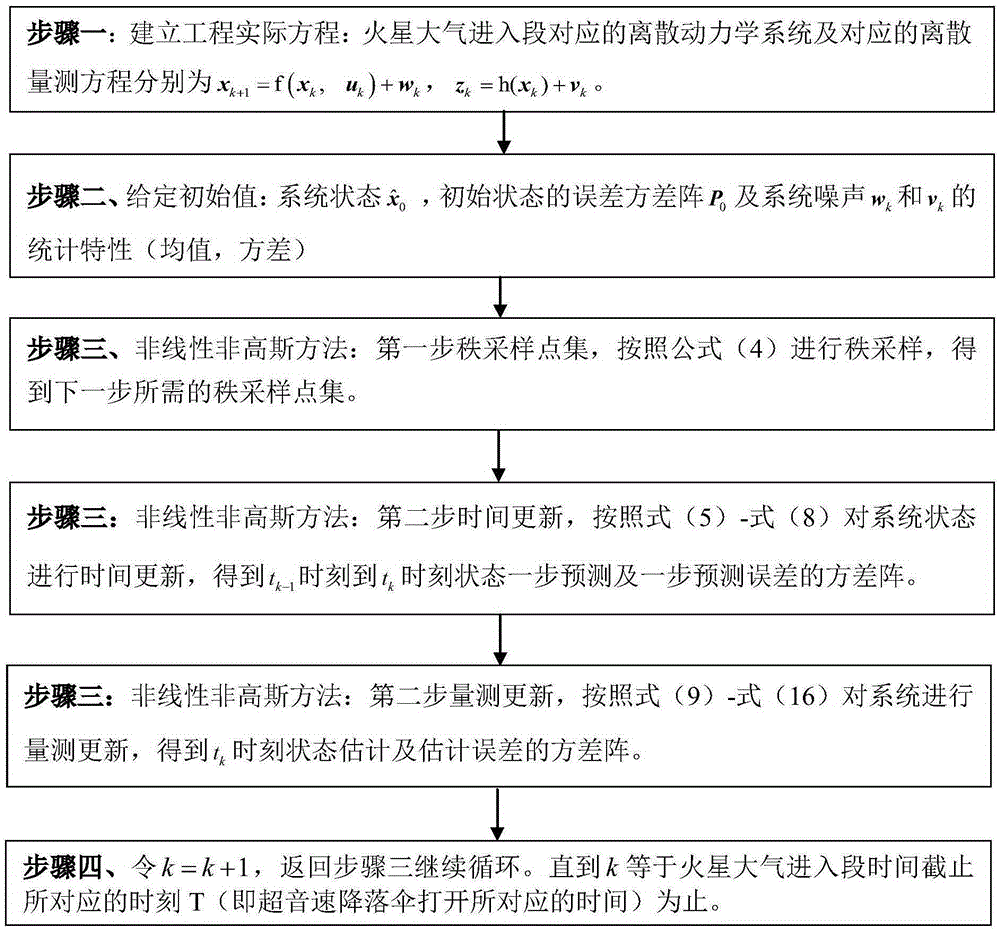
[0092] See Figure 1-Figure 3 , the present invention relates to a nonlinear non-Gaussian rank filtering method for the Martian atmosphere entry section, the specific implementation steps are as follows:
[0093] The probe enters the Martian atmosphere along the flight trajectory, and the corresponding simplified dynamical system is the following equation.
[0094] r · = v sin γ v · = - ( d + g sin γ ) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



