

Method for estimating the angular deviation of a mobile element relative to a reference direction
A moving element, reference direction technology, applied in the field of navigation field, can solve the problem of not allowing accurate route estimation to minimize the cost of implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
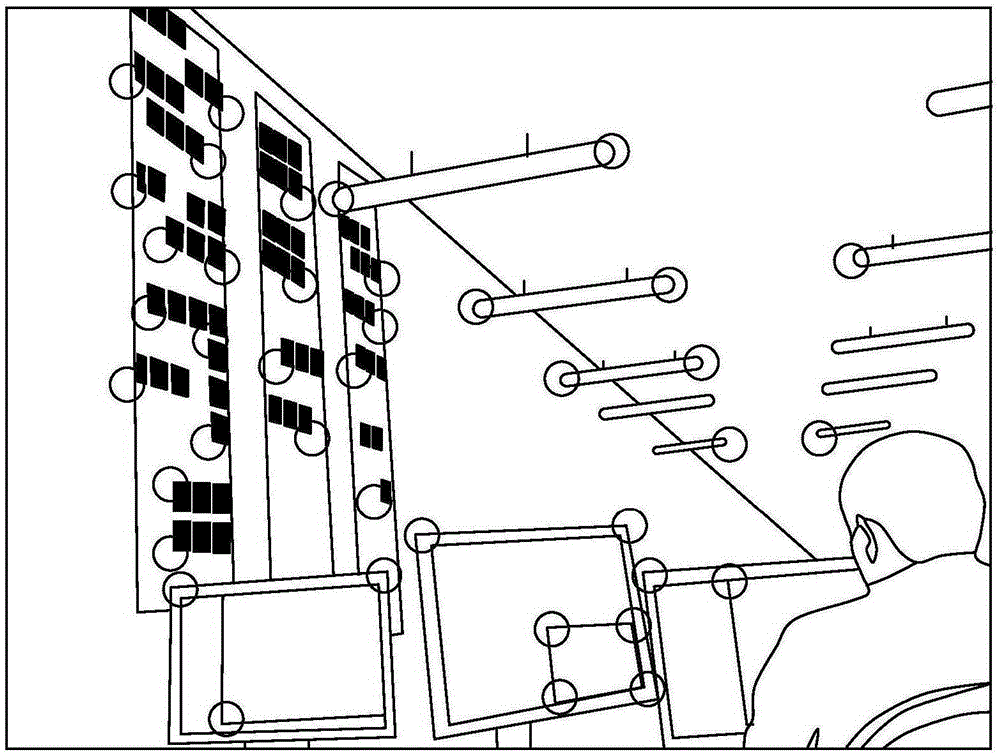
[0036] In this description, the invention is described using an example of implementation on a robot, and more particularly on a humanoid robot. However, the invention is applicable to any moving element. In particular, the invention is applicable to any type of vehicle, ship or aircraft.
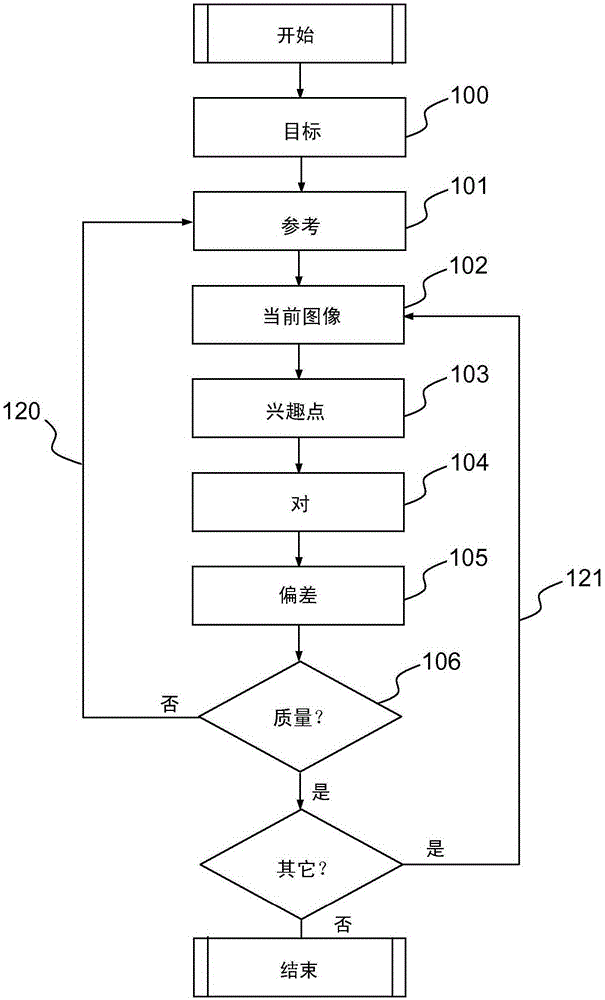
[0037] The subject of the invention is in particular a method for estimating the angular deviation of a robot relative to a reference orientation. This relative angular deviation is defined as the angle between the reference direction and the orientation of the robot at the moment of estimation. The orientation of the robot at the estimated instant is also referred to as the current orientation. As an example, the value of this angle is determined clockwise from the reference direction.
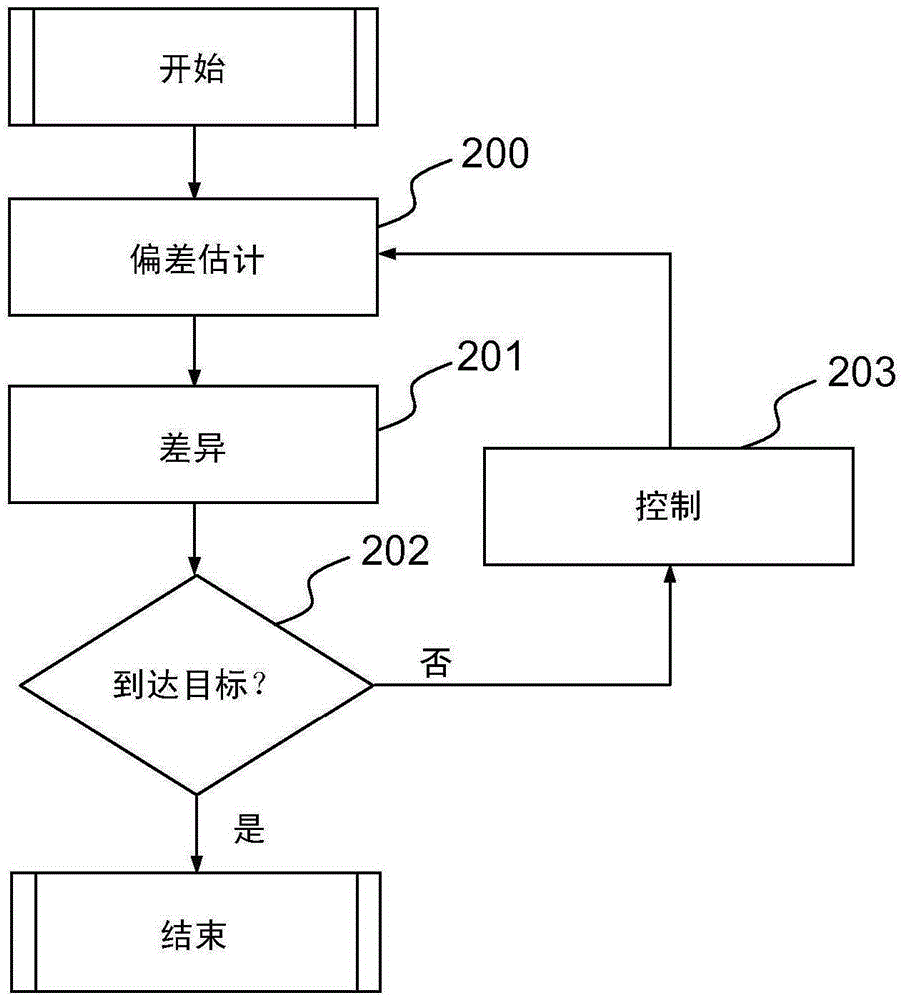
[0038] Advantageously, the estimation of the relative angular deviation of the robot can be used to precisely control its movement, in particular to perform a rotation around a fixed point at a given an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More