

Three-finger three-degree-of-freedom configuration robot gripper
A robot hand, degree of freedom technology, applied in the field of robots, can solve the problems of low reliability, many degrees of freedom, difficult to grasp, etc., to achieve the effect of improving operation ability, reducing degrees of freedom, and strong operation ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0036] Specific implementation mode one: as Figure 1 to Figure 20Shown, a kind of robot gripper of three-finger three-degree-of-freedom configuration, comprises palm 7, connecting flange 8, circuit board 14, rotating supporting part one, rotating supporting part two and three fingers (referring to three fingers), so The three fingers described above have the same structure, and the three fingers are respectively finger one 10, finger two 11 and finger three 12; the palm 7 includes a palm cover 51, a palm shell 52, a support 13 and a support two 39, and The upper end of the palm shell 52 is fixedly connected with the palm cover plate 51 (by screws), the lower end of the palm shell 52 is fixedly connected with the connecting flange 8 (by screws), and the first bracket 13 and the second bracket 39 are all arranged on the palm shell 52. Inside and fixedly connected with the palm cover plate 51 (by screws), the circuit board 14 is arranged in the palm shell 52 and fixedly connecte...
specific Embodiment approach 2
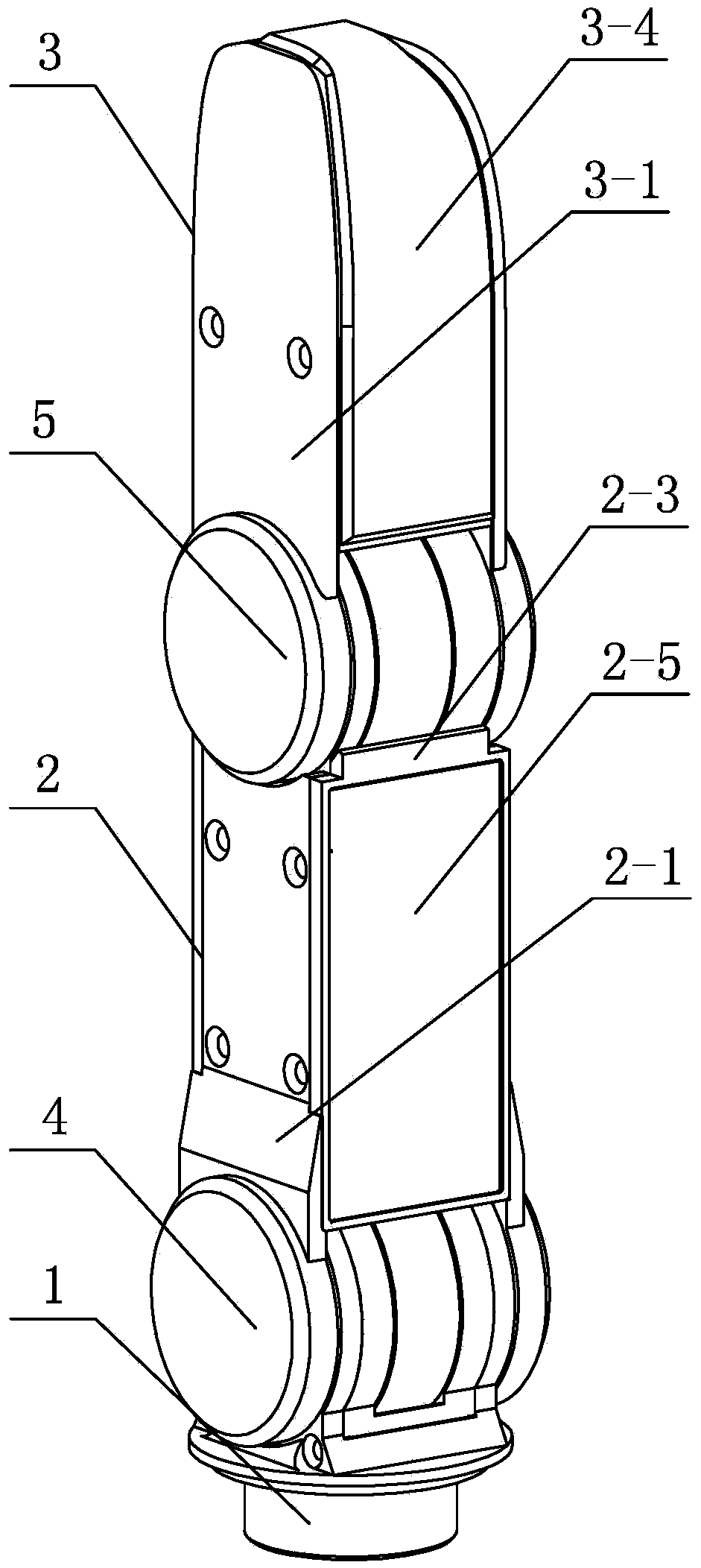
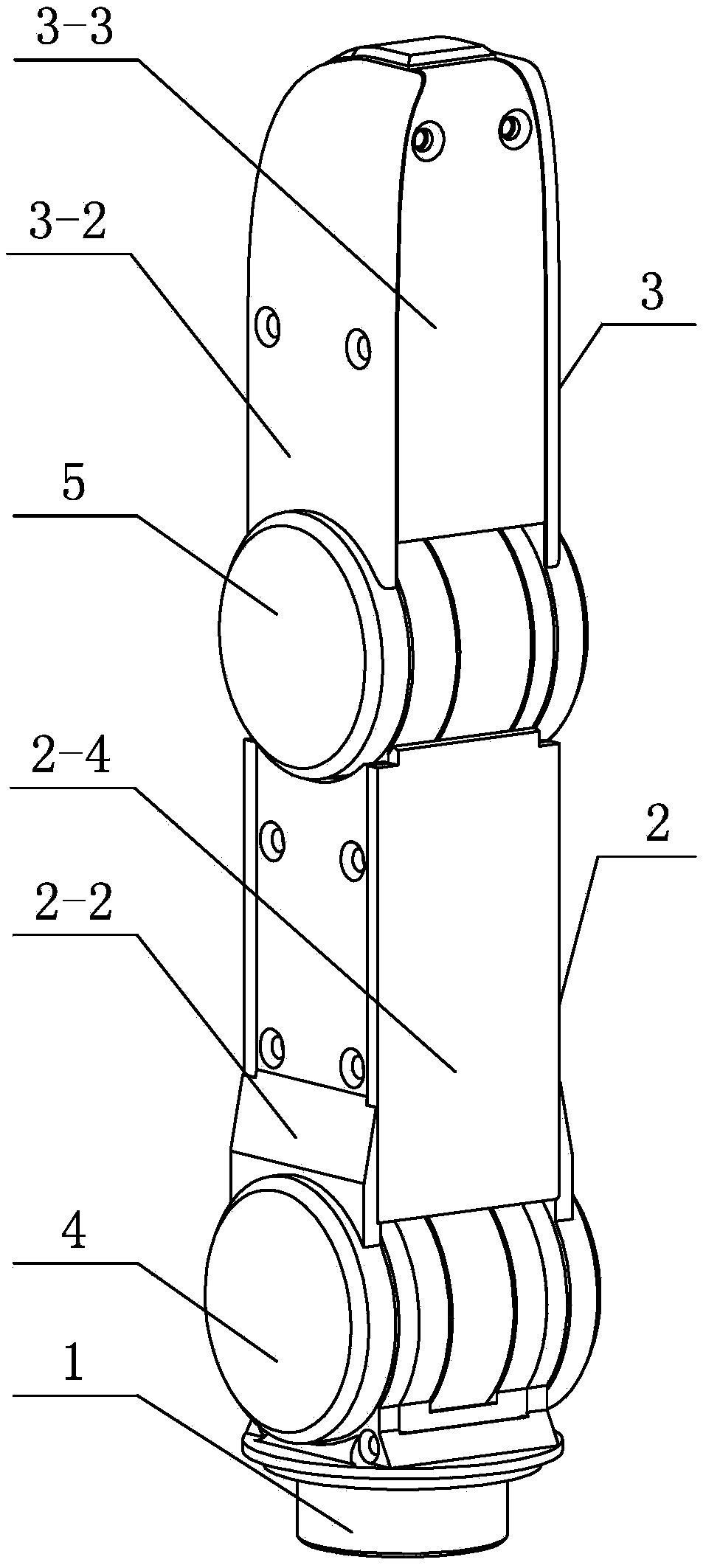
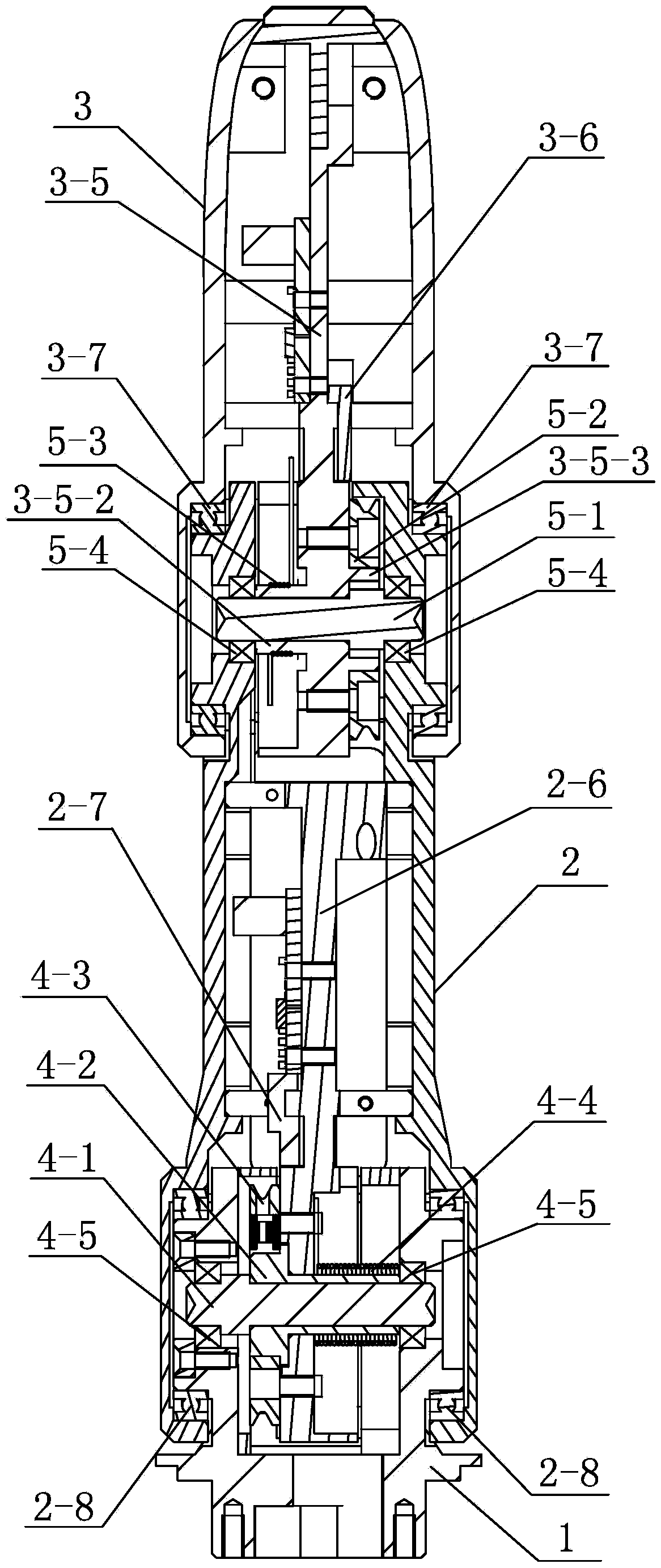
[0039] Specific implementation mode two: as Figure 1 to Figure 12 , Figure 19 ~ Figure 22 As shown in the first embodiment, a three-finger three-degree-of-freedom robot gripper described in the first embodiment, the first rotating support part includes a supporting bearing 53 and an end cover 54, and the second rotating supporting part includes a support Bearing two 55 and end cap two 56, each of the fingers includes base 1, proximal knuckle 2, terminal knuckle 3, tendon sheath driving mechanism one, connecting end cap 57 and two pitching and rotating joints, the said The two pitching and rotating joints are the base joint 4 and the terminal joint 5 respectively; the proximal knuckle 2 includes the proximal knuckle shell, the proximal knuckle force transmission member 2-6 and two proximal knuckle support bearings 2-8, so The said proximal knuckle shell comprises the proximal knuckle left panel 2-1, the proximal knuckle right panel 2-2, the proximal knuckle front cover 2-3 a...
specific Embodiment approach 3
[0042] Specific implementation mode three: as Figure 13 to Figure 16 , Figure 23 As shown, a robot gripper with three fingers and three degrees of freedom described in Embodiment 2, the three-finger base joint synchronous bending mechanism includes a base joint synchronous rotation driver 9, a base joint bushing 2 16, a base joint Joint worm 17, base joint worm gear 18, base joint tendon wheel 2 19, base joint shaft 2 20, base joint end cover 22, non-contact position sensor 1, two base joint support bearings 15, two base joint support bearings Two 21 and three base joint sheath tubes 33; the output shaft of the base joint synchronous rotation driver 9 is fitted with a base joint sleeve 2 16, and the middle part of the base joint worm 17 is provided with a through cavity along the axial direction, The base joint shaft sleeve 2 16 is fixedly inserted into the through cavity of the base joint worm 17, and the two ends of the base joint worm 17 are respectively supported and fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More