

Wide-range grabbing under-actuated multi-adaptive manipulator
An underactuated, large-scale technology, applied in the field of robotics, can solve the problems of complex control system, high manufacturing cost, complex driving structure, etc., to achieve a wide range of use, simple assembly, and maximize the effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in more detail below in conjunction with the accompanying drawings and embodiments.
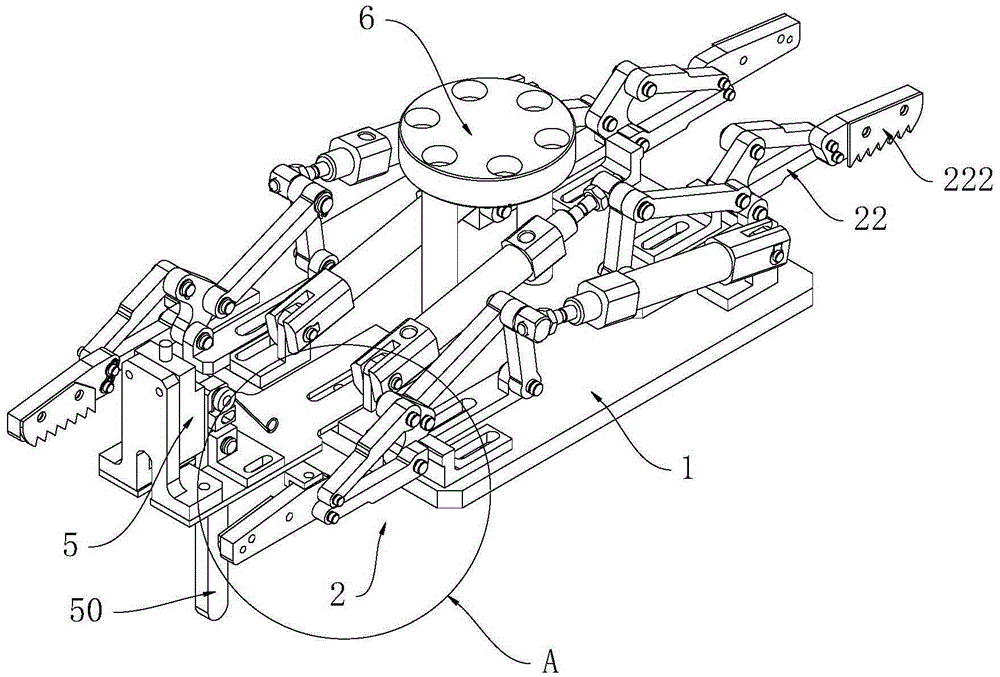
[0024] The invention discloses a large-scale grasping under-actuated multi-adaptive manipulator, which combines Figure 1 to Figure 6 As shown, it includes a support frame 1, and the support frame 1 is provided with at least two relative single-finger mechanisms 2, wherein:
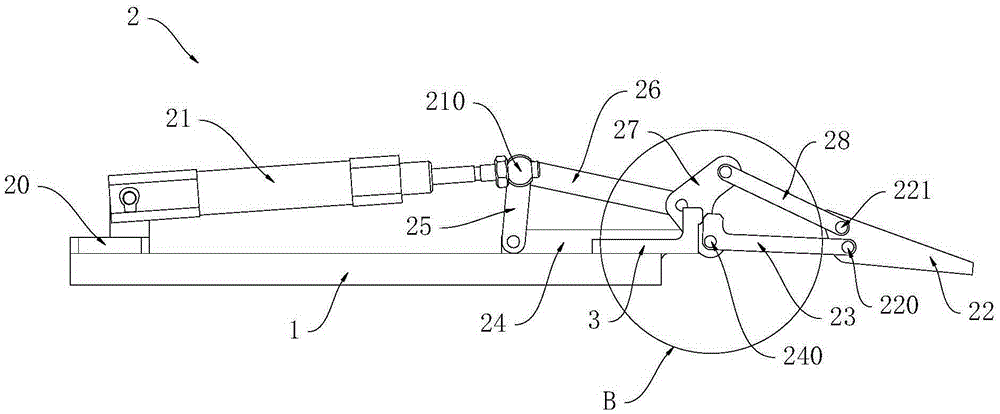
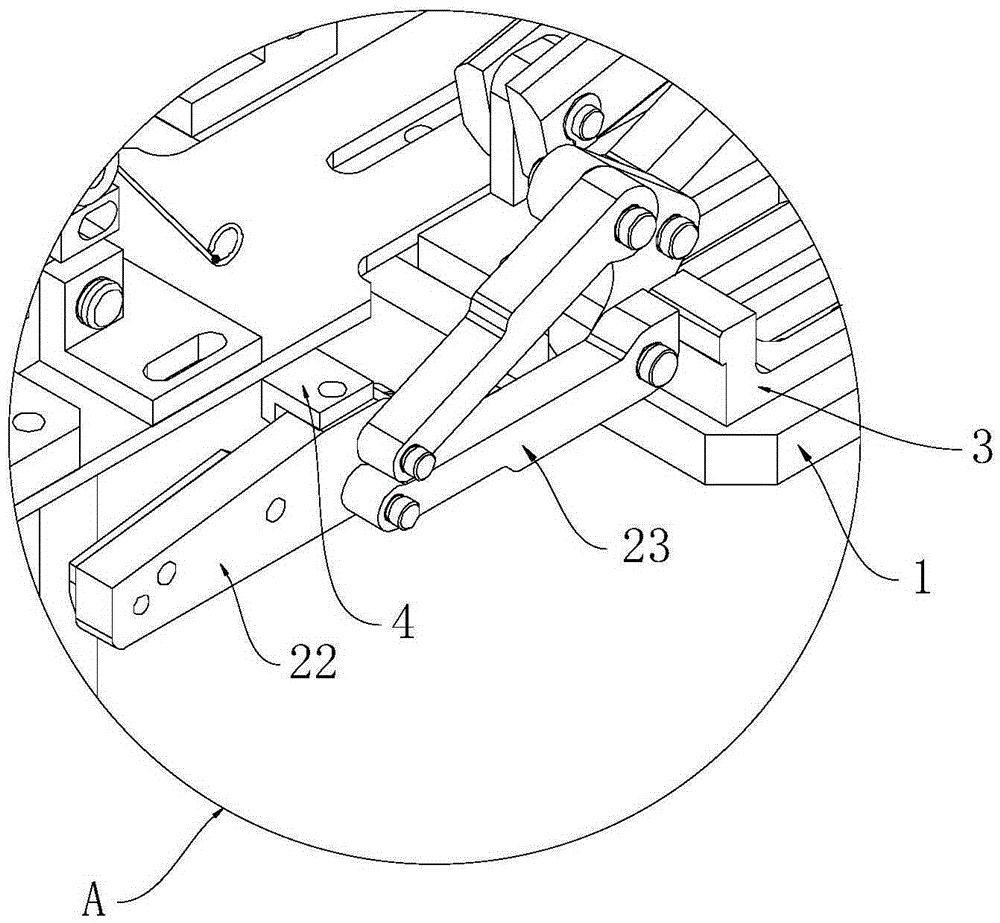
[0025] The single-finger mechanism 2 includes a cylinder block 20, a cylinder 21, a front knuckle 22, a middle knuckle 23, a last knuckle 24, a first connecting rod 25, a second connecting rod 26, a V-shaped connecting rod 27 and a third connecting rod. Rod 28, the cylinder base 20 and the last knuckle 24 are all fixed on the support frame 1, the end of the cylinder 21 is hingedly connected with the cylinder base 20, and the front end of the cylinder 21 is used to drive a push joint 210 to move back and forth, The pushing joint 210 passes through one end of the first connec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More