

Operating speed-adjustable intelligent warehouse logistics system
A technology of intelligent warehousing and operating speed, which is applied in the field of warehousing and logistics to achieve the effect of simplifying the complexity of the structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
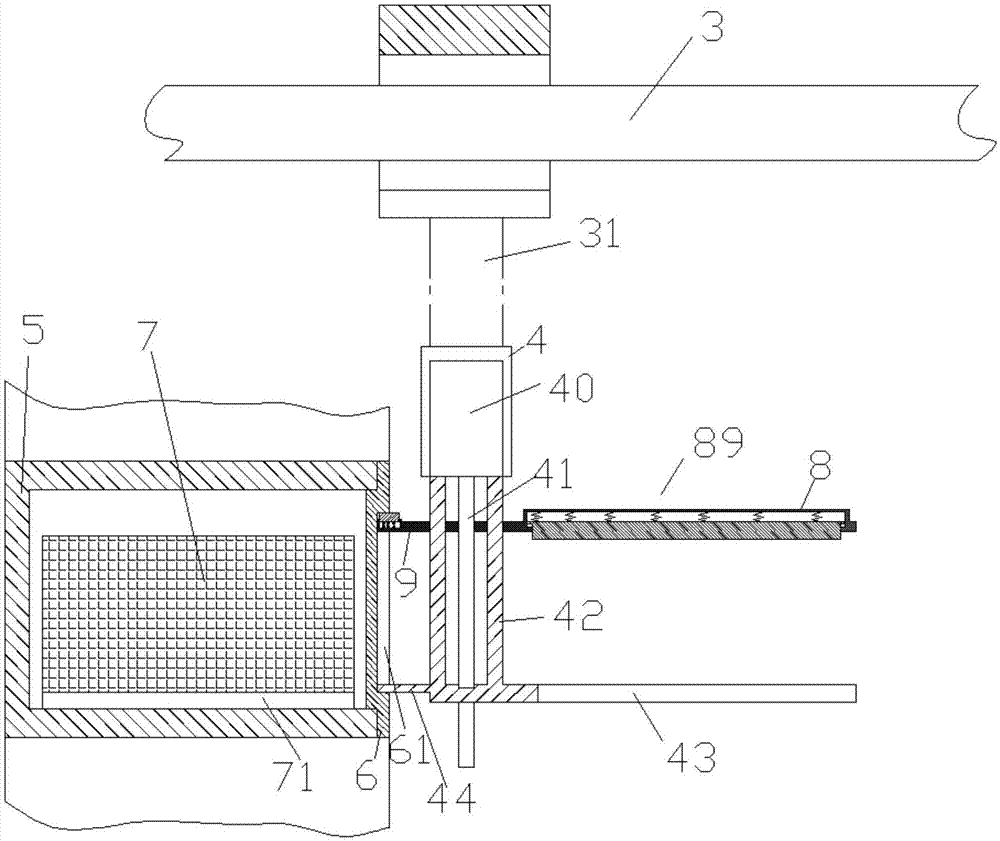
[0011] combined with Figure 1-4 , to explain the present invention in detail.
[0012] An intelligent storage and logistics system with adjustable operating speed according to an embodiment includes a control device 100, a storage cabinet device, and a material transportation device, wherein the storage cabinet device includes a plurality of grippers for accommodating the bottom surface. Take the unit cabinet 5 of the material box 7 of the groove 71, the access opening of the unit cabinet 5 is equipped with an openable cover 6 with a grip groove 61 on the outer surface; the material transport device includes a drive mechanism 3 and The material box operating device connected to the drive mechanism 3 through the connecting rod 31 extending in the vertical direction, the driving mechanism 3 can drive the material box operating device to translate in the vertical direction, around the connecting rod The axis of 31 rotates and can move in translation in the left and right direct...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More