

Robotic airship system capable of locking target area for observation based on autonomous navigation
A technology for unmanned airship and target area, applied in three-dimensional position/channel control and other directions, can solve the problems of unmanned airship research still in the laboratory stage, immature unmanned airship control technology, manned and other problems, to achieve practicality The effect of strong, strong supervision and low energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039]In order to describe the present invention more specifically, the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
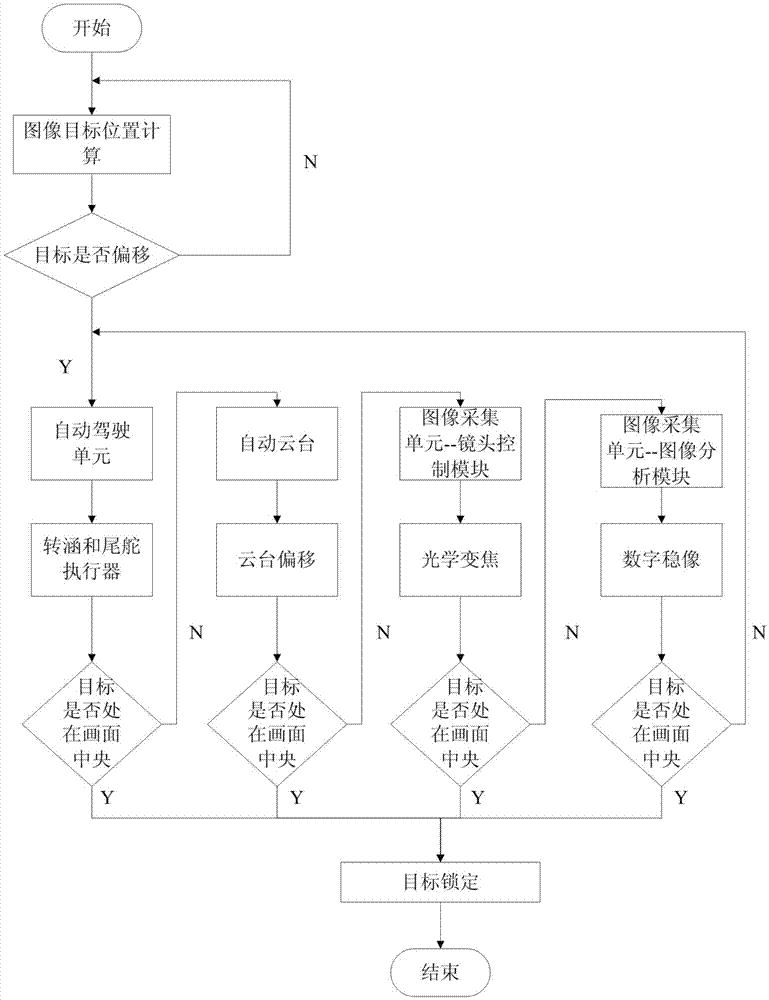
[0040] The unmanned airship system of the present invention includes: an airship and a ground monitoring terminal; Conduct inspections on the situation in key target areas.
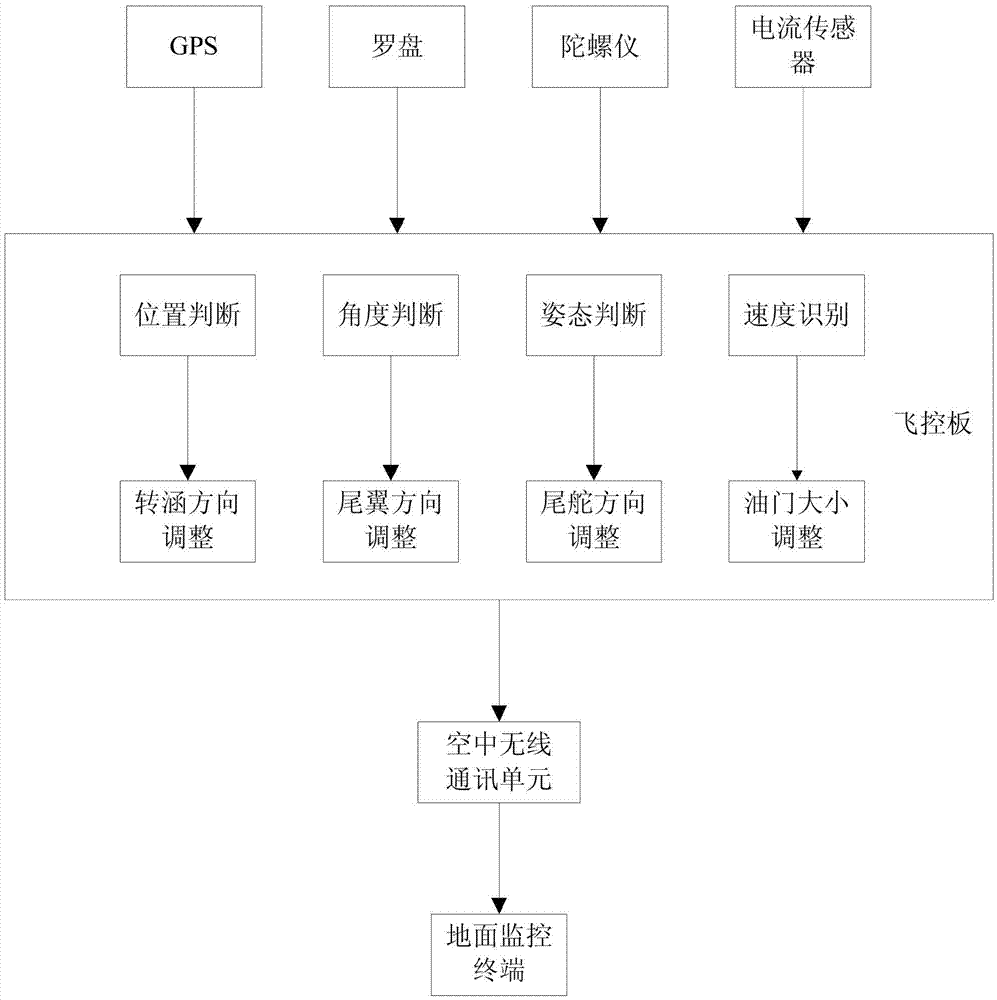
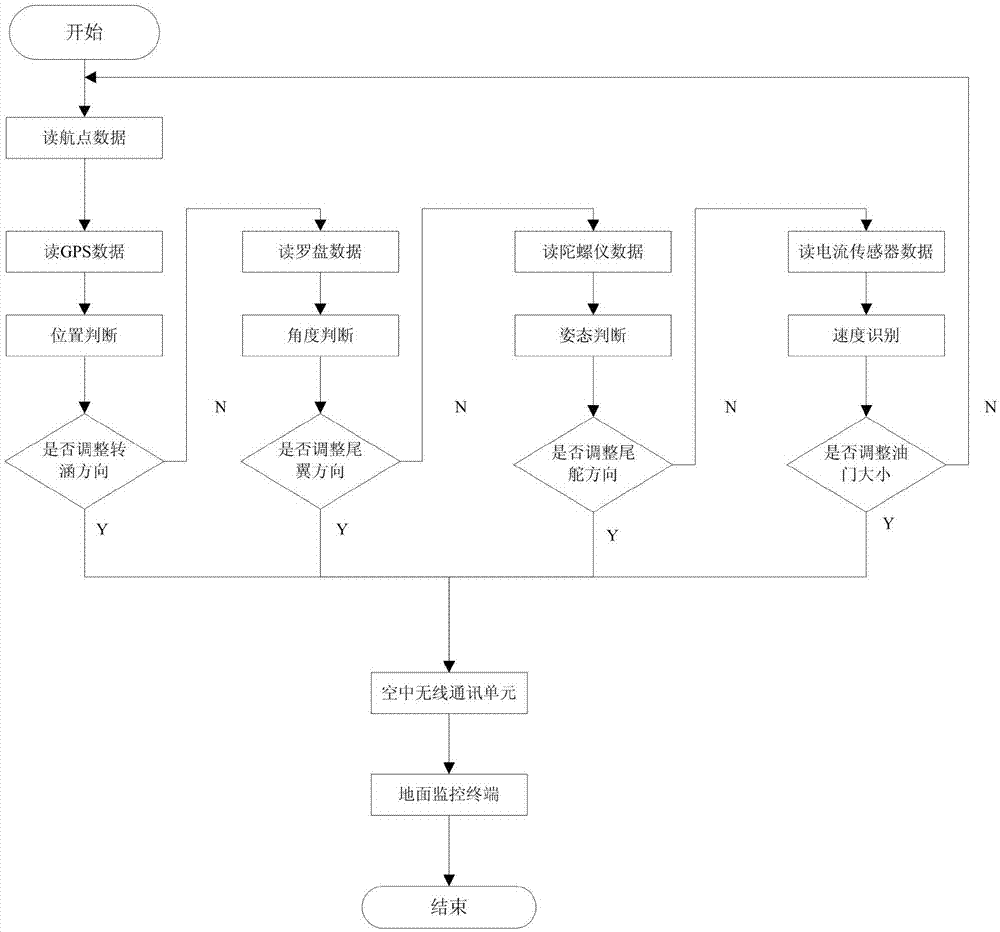
[0041] The GPS module in the airship application autopilot unit is responsible for positioning and navigation, and completes the autonomous navigation mode in the air, and the air wireless communication unit is connected with the wireless communication unit on the ground, and the navigation results are returned to the ground monitoring terminal; in this embodiment , the autopilot unit includes GPS module, compass, gyroscope, current sensor and flight control board, such as figure 1 As shown; the GPS module, compass, gyroscope and current sensor respectively obtain the position inform...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More