

Omnidirectional moving transfer robot with Mecanum wheels
A handling robot, omnidirectional movement technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of difficult to deal with the working environment, less freedom of the actuator, low movement flexibility, etc., to improve the movement flexibility, ensure control accuracy, Overall compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific preferred embodiments.
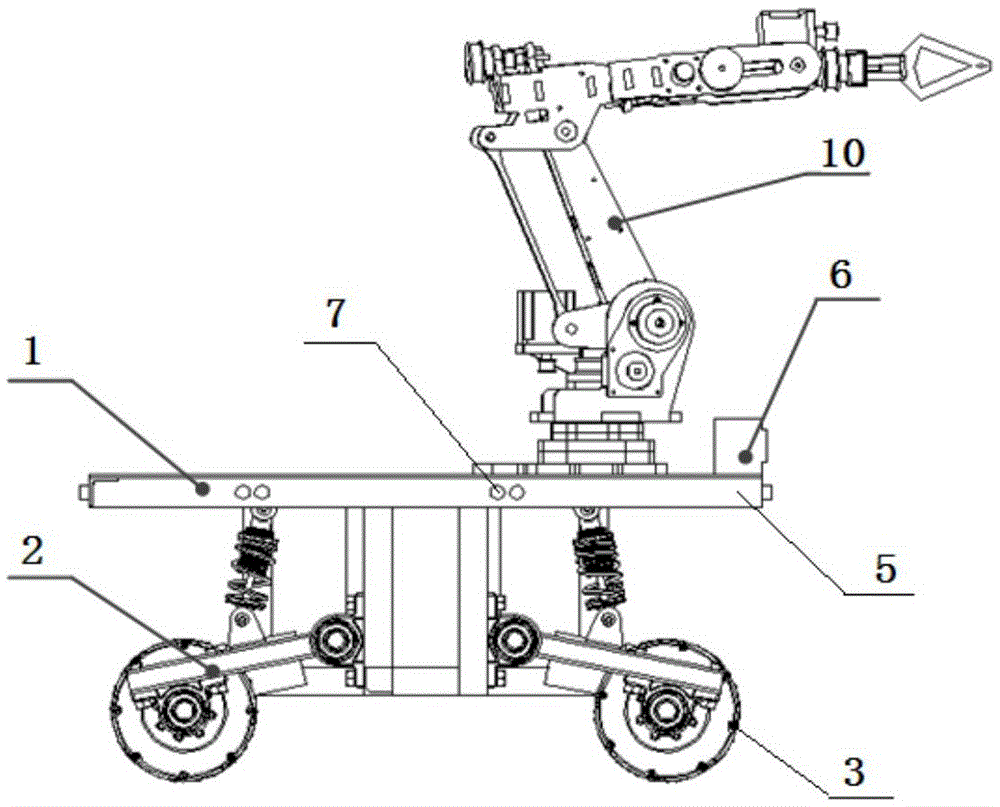
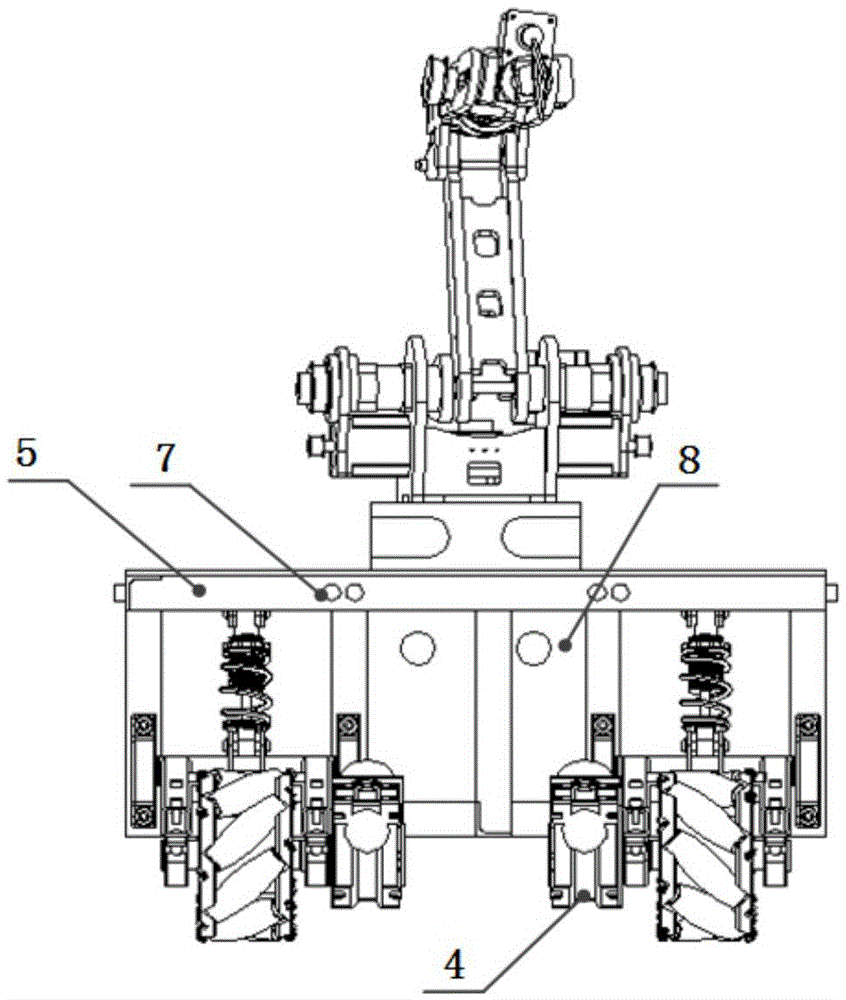
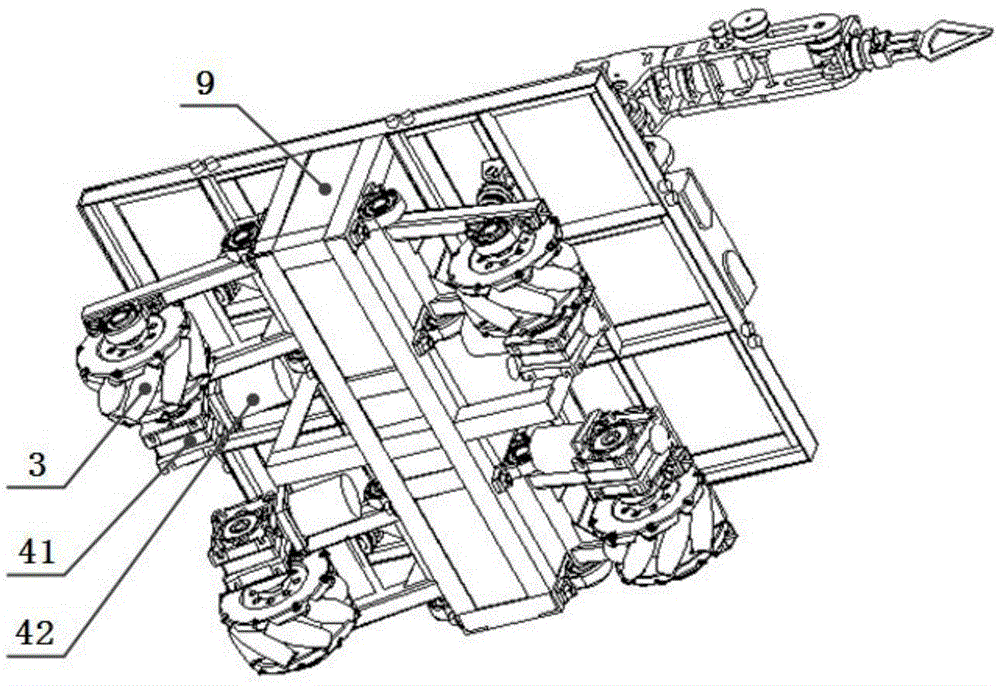
[0049] Such as figure 1 , figure 2 , image 3 and Figure 4 As shown, a mecanum wheel omnidirectional mobile handling robot includes a six-degree-of-freedom manipulator 10, an omnidirectional mobile chassis 1, a binocular vision device 6, a main control box 8, a battery pack 9 and a remote monitoring device.
[0050] The omnidirectional mobile chassis 1 includes a frame 5 and several mecanum wheels 3 arranged under the frame 5 . The four mecanum wheels 3 are distributed at four corners under the frame 5 . The number of mecanum wheels 3 can also be set in multiples according to needs, all of which are also within the protection scope of the present invention.
[0051] The six-degree-of-freedom manipulator 10 is fixedly arranged on the top of the vehicle frame 5 ; the binocular vision device 6 is fixedly arranged on the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More