

Two-degree-of-freedom humanoid ankle joint
An ankle joint, degree of freedom technology, applied in the direction of motor vehicles, transportation and packaging, can solve the problems of difficult control, increased swing inertia of the ankle joint, and complicated ankle structure due to the driving mechanism and driving method, so as to improve the movement of the ankle. Flexibility, improved anthropomorphism, high similarity effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
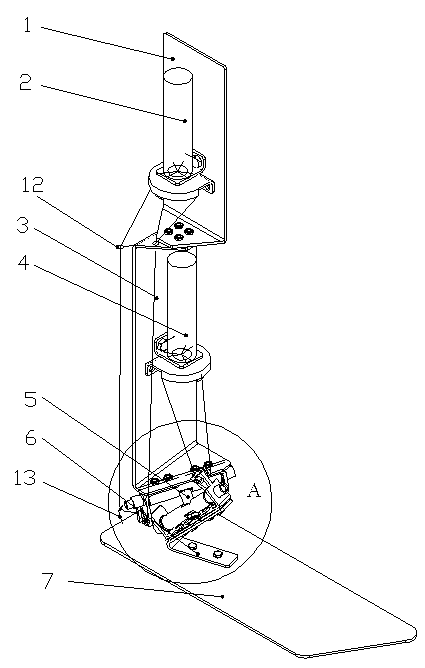
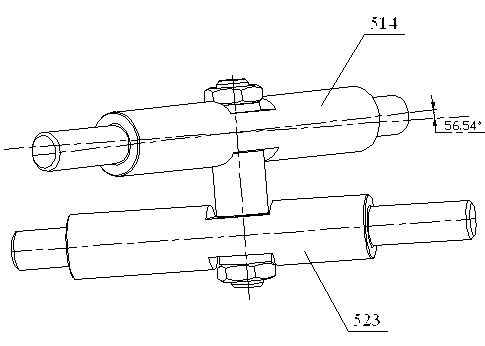
[0020] to combine Figure 1-9 , the present invention is composed of calf upper part 1, calf lower part 3, driving device I2, driving device II4, double joint member 5, bending bracket 6, foot 7, and driving brake line; calf upper part 1 and calf lower part 3 are flange parts , between the upper leg 1 and the lower leg 3 are connected by bolts, such as figure 1 and Figure 9 shown. The 3-fold bending angle of the lower leg ensures that the included angle between the ankle joint axis 514 and the frontal plane is 25°, and the included angle with the horizontal plane is 8°, for example figure 2 shown. The ankle joint axis 514 and the subtalar joint axis 523 are secured by screws to ensure that the included angle is 56.54° and the distance is 20 mm, as image 3 shown. The subtalar joint axis 523 is installed on the bending bracket 6, and the bending angle of the bending bracket 6 and its installation direction angle on the foot 7 ensure that the included angle between the su...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More