

Real-time dynamic obstacle avoidance device and obstacle avoidance method of dual robots
A dual-robot, real-time dynamic technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as inability to realize dynamic obstacle avoidance and inability to guarantee robot continuity, so as to enhance the chance of impending collision and improve efficiency , the effect of a wide range of applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to make the objectives, technical solutions, and advantages of the present invention clearer, the following further describes the present invention in detail with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not conflict with each other.
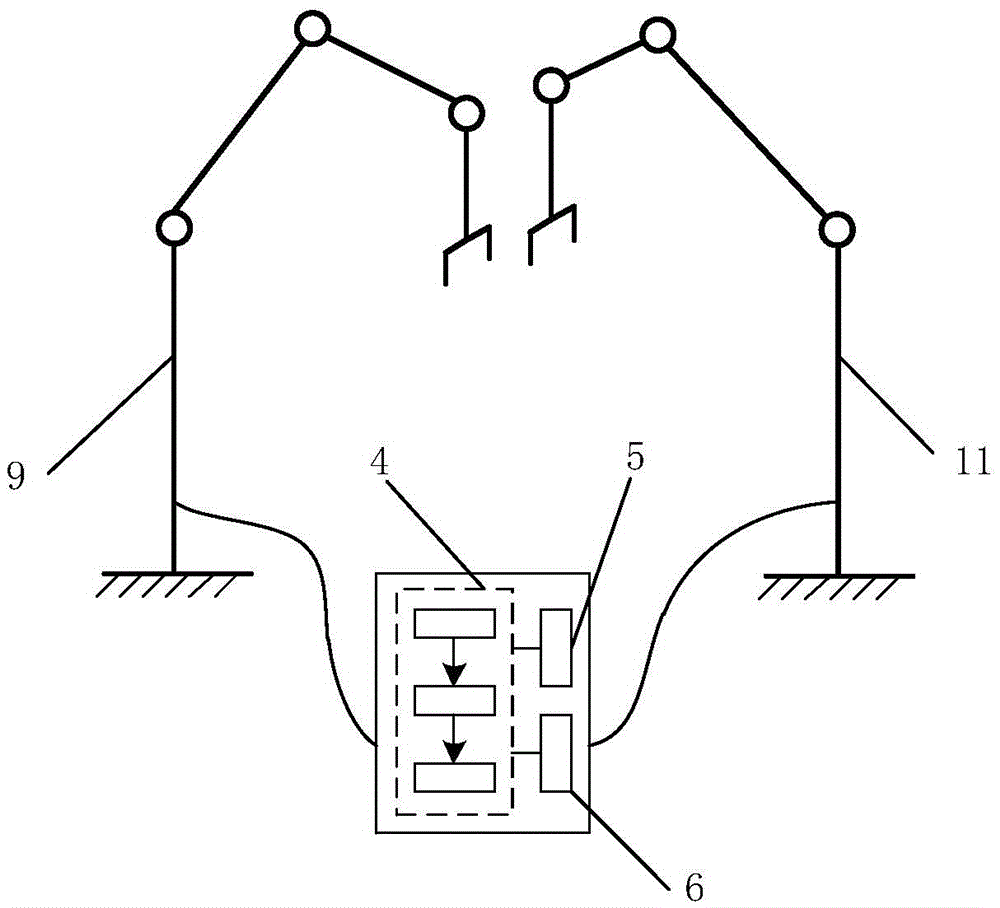
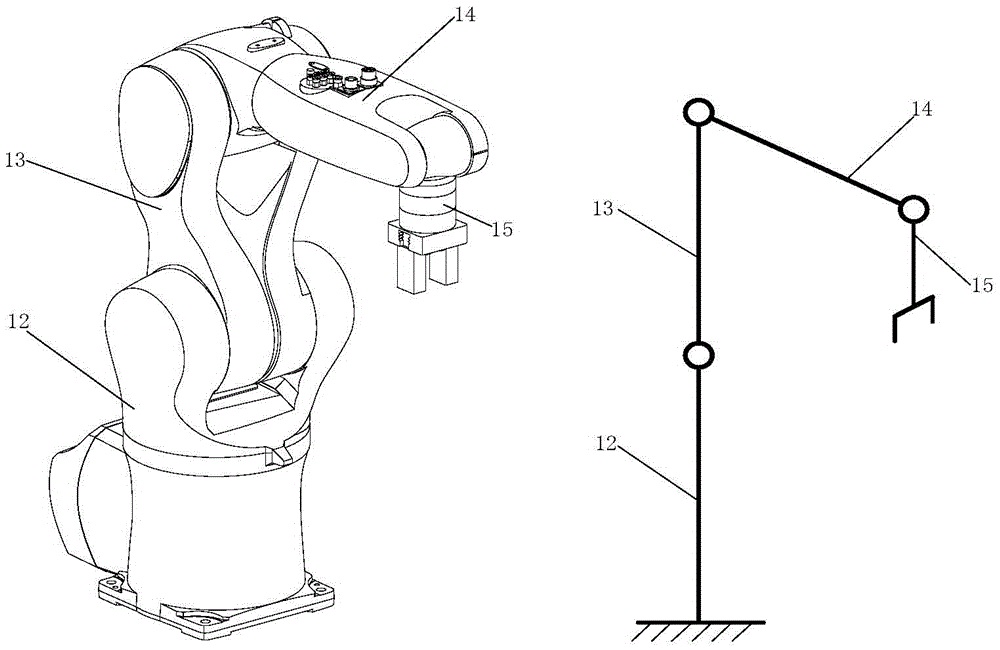
[0026] Such as figure 1 As shown, firstly, how to realize the control connection between the obstacle avoidance device and the dual robots is described. Among them, the robot 9 and the robot 11 simplify the dual robots according to the motion joint composition of the robot, such as image 3 As shown, the input and output module 6 and the communication module 5, and the dynamic obstacle avoidance main ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More