

A Coal Mine Roadway Robot Positioning and Environment Modeling Method
A technology of robot positioning and coal mine roadway, which is applied in two-dimensional position/channel control and other directions, and can solve problems such as endangering the safety of surveyors, harsh underground conditions, and difficult surveying work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention is described in detail below in conjunction with accompanying drawing and example:
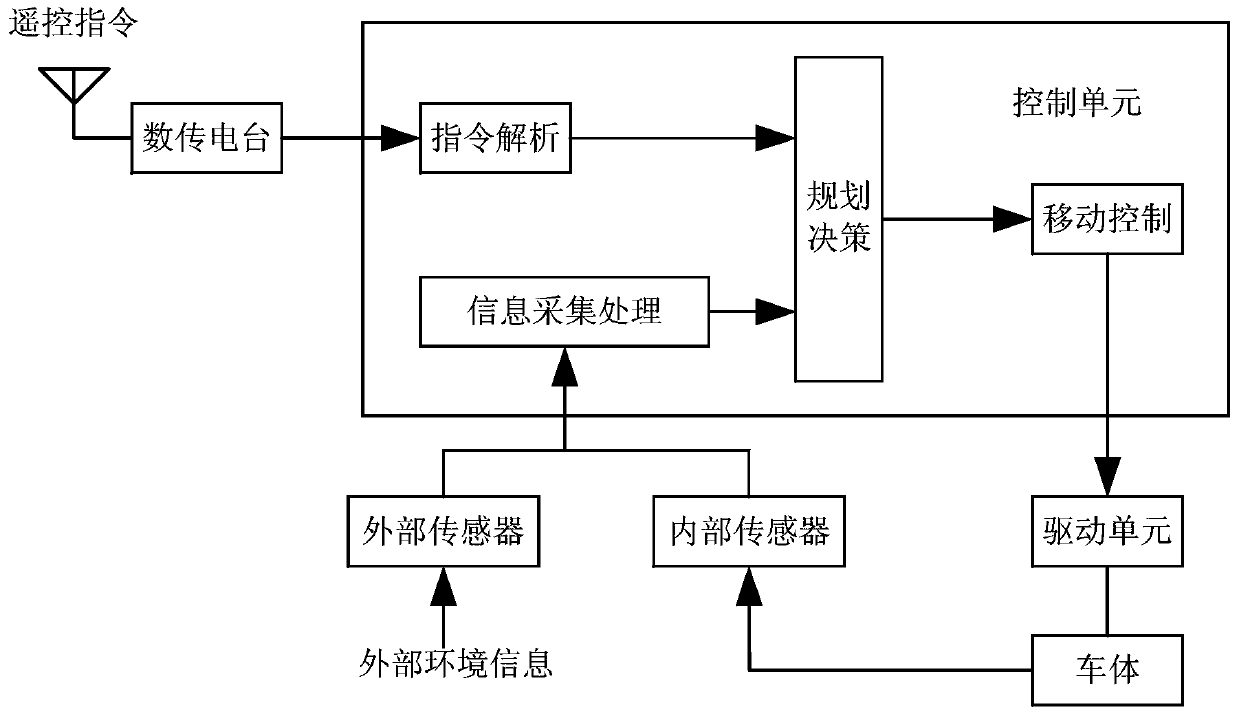
[0045] The control principle of coal mine roadway detection robot is as follows: figure 1shown. Internal sensors include odometry and an inertial navigation system to measure the robot's displacement and attitude. External sensors include laser radar, camera, ultrasonic ranging sensor, and infrared ranging sensor. Among them, laser radar and camera are used to directly perceive environmental information, and ultrasonic and infrared ranging sensors are used for emergency obstacle avoidance. The on-board computer is used to collect information from various sensors, process the information, make decisions, and send control instructions to the drive unit.
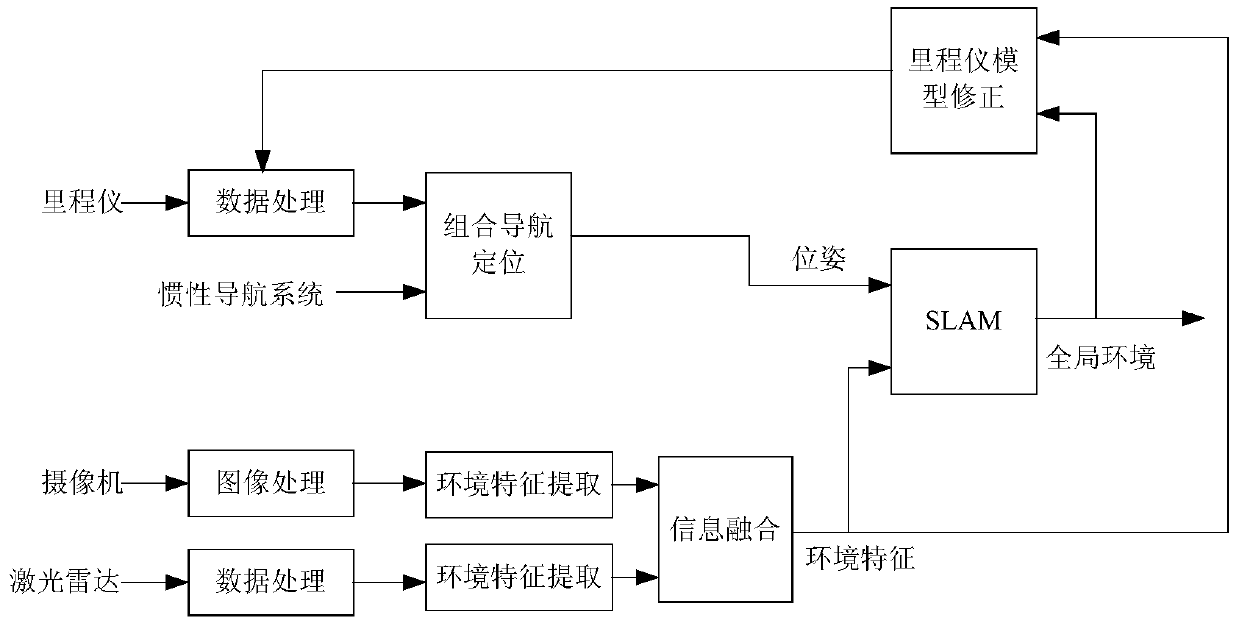
[0046] The algorithm principle of the information collection and processing module is as follows: figure 2 shown. The internal sensor odometer and inertial navigation system obtain the current position and head...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More