

Autonomous traffic control method and device for AGVs and AGVs
A technology of traffic control and AGV-A, which is applied in the traffic control system of road vehicles, traffic control systems, instruments, etc., can solve the problems of reduced probability, inability to effectively identify traffic lights, and affect the experience of plant operators, so as to avoid collisions , the effect of improving operating efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
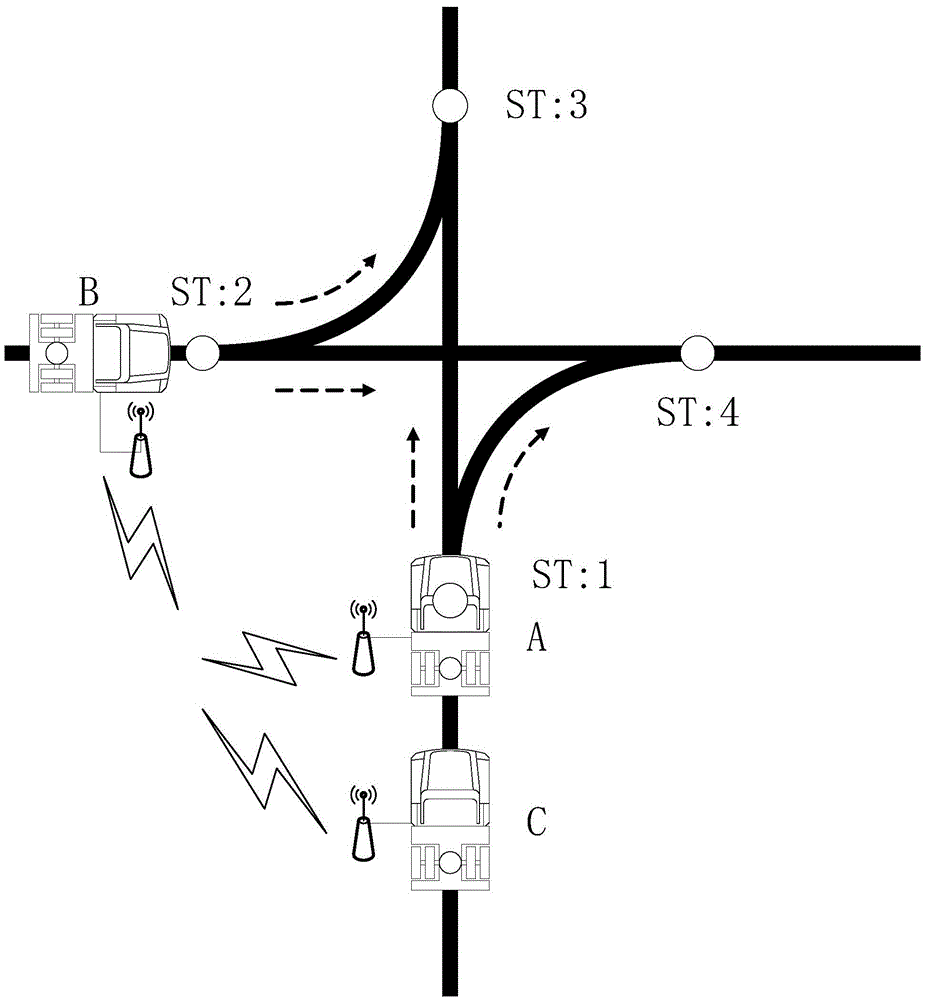
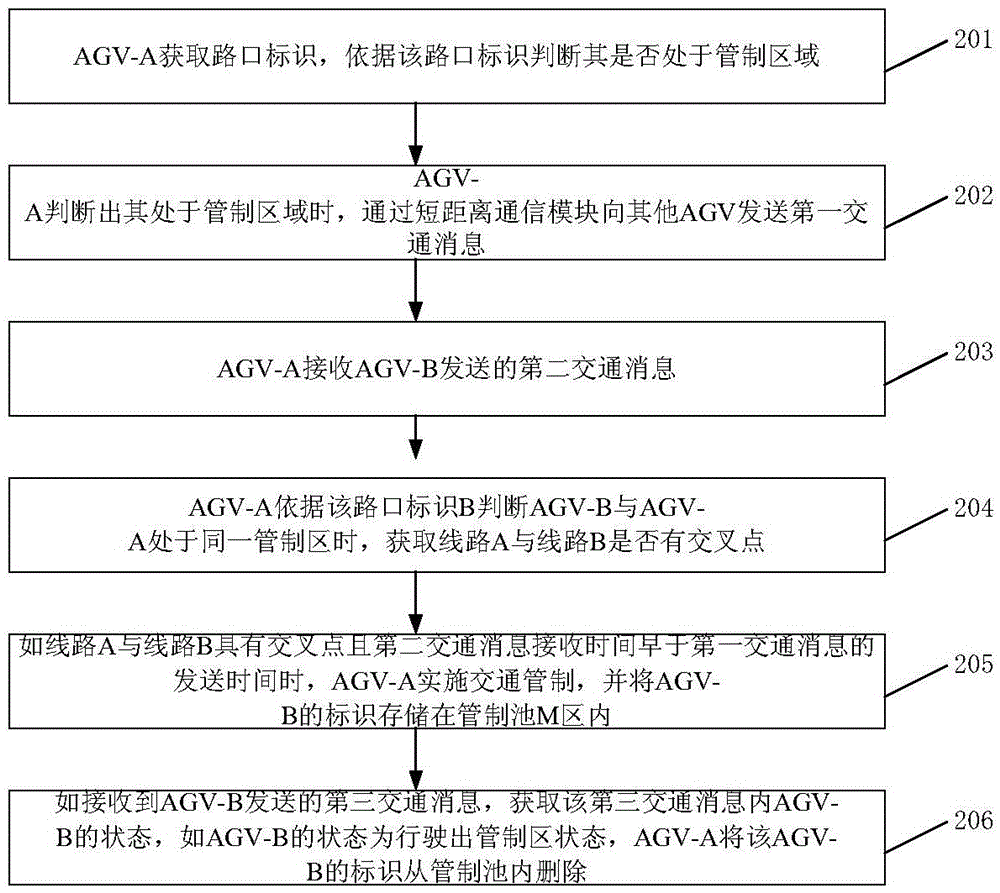
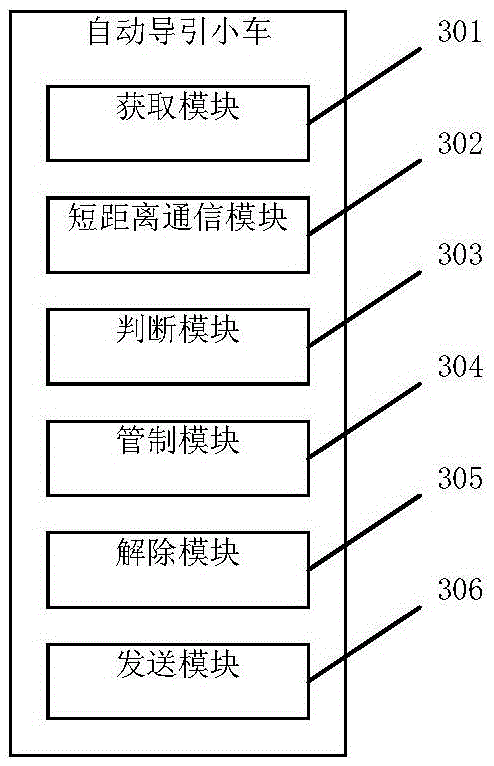
[0033] Please refer to figure 1 , figure 2 , figure 2 It is an autonomous traffic control method for AGVs proposed by an embodiment of the present application. The method operates between multiple AGVs. For the convenience of description, multiple AGVs are in the form of AGV-A, AGV-B, AGV-C, etc. Distinguish, the implementation scenario of this method is as follows figure 1 shown, see figure 1 , where ST represents intersection, in order to distinguish between multiple intersections, figure 1 Take the intersection as an example, that is, there are 4 intersections in total as an example. In practical applications, the number of intersections can be adjusted according to the actual situation. For example, it can be 3 intersections, 5 intersections or 6 intersections. This application does not limit The number of the intersection, each AGV is provided with a short-distance communication module (specifically, a short-distance communication module such as Bluetooth, RF or WIF...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More