A combat management method for multi-UAV task assignment
A technology of task allocation and management method, which is applied in the field of combat management of multi-UAV task allocation, can solve the problem of not being able to give full play to the overall advantages of multi-machine cooperative operations, insufficient research on heterogeneous UAV cooperative operations, heterogeneous UAV Issues such as the lack of in-depth research on the execution of task assignments, to achieve the effect of improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
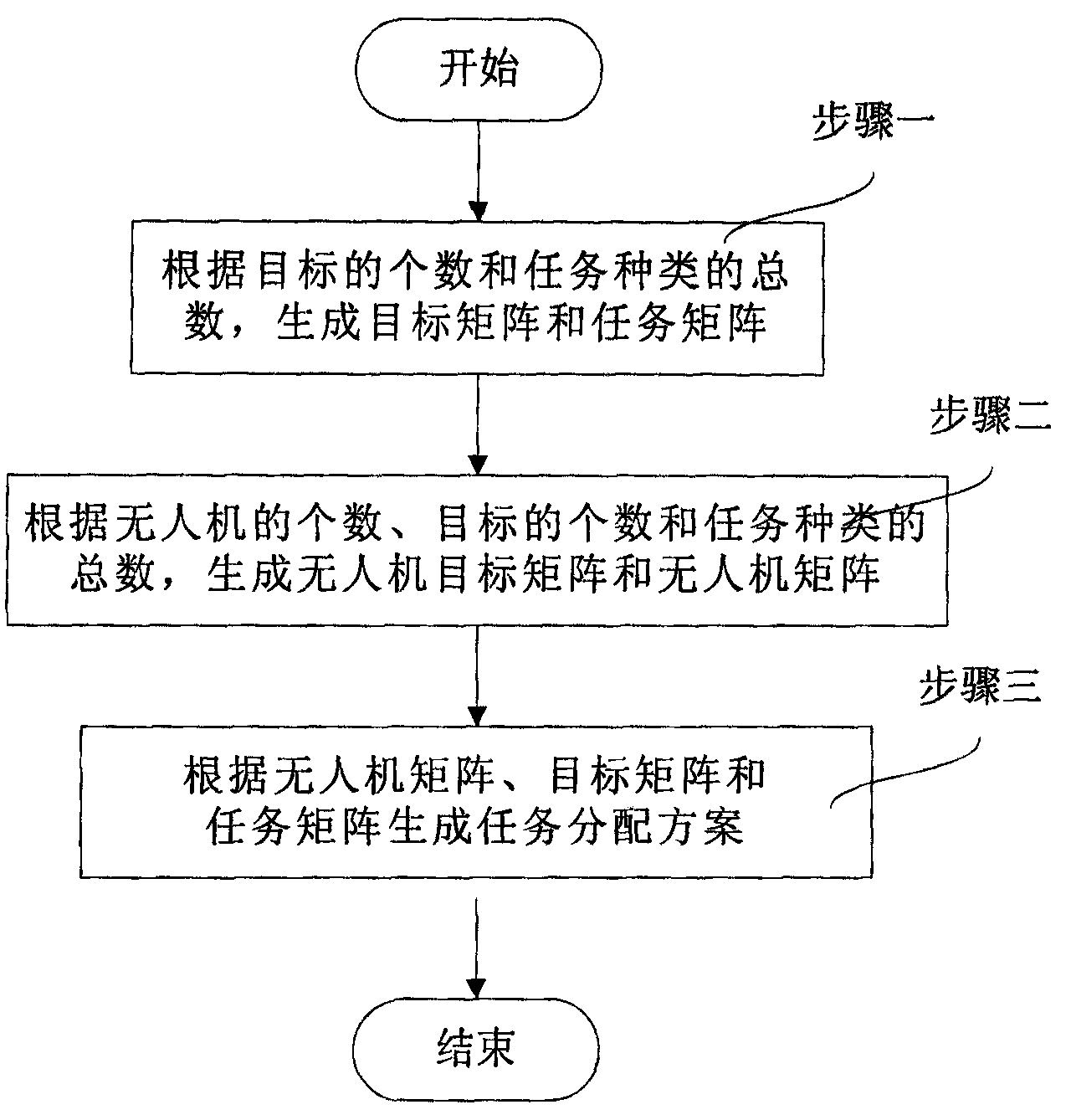
[0035] A combat management method for multi-UAV task assignment, such as figure 1 As shown, the specific steps are:
[0036] Step 1. Generate a target matrix O[N×K] and a task matrix P[N×K] according to the number of targets N and the total number K of task types;
[0037] The specific process of this step is:
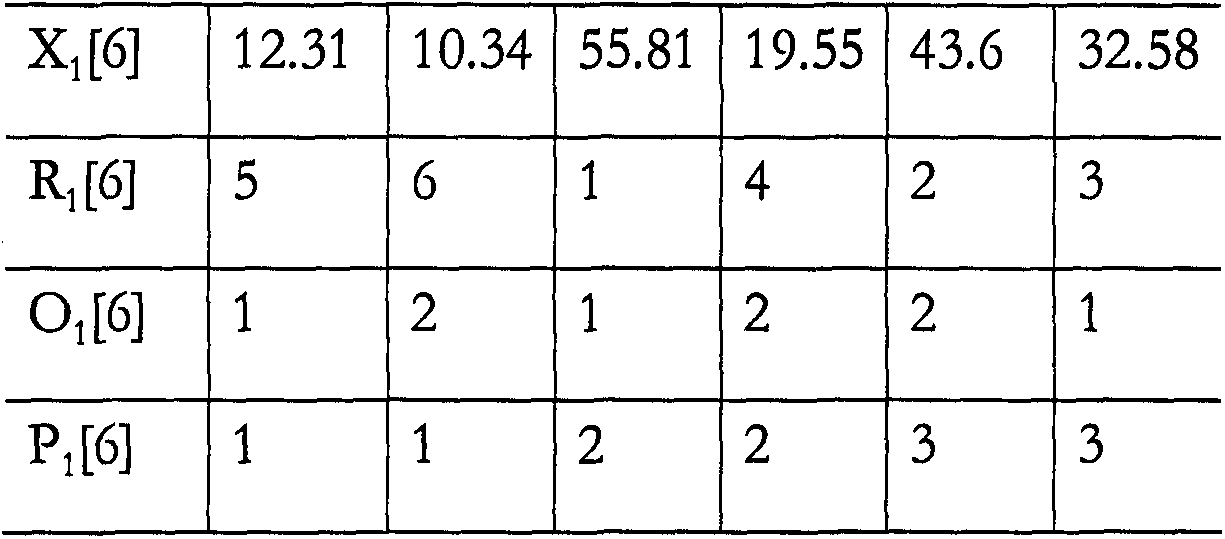
[0038] A1. According to the number N of targets and the total number K of task types, randomly generate a one-dimensional array X[N×K] of size N×K, and each element in X[N×K] is different from each other real number;
[0039] A2. Sort the N×K elements contained in X[N×K] in ascending order, set R(i) equal to the serial number of X(i) in ascending order, and obtain a one-dimensional array R[ N×K], i=0, 1...N×K-1;
[0040] A3. Let O(i) be equal to R(i) and take the modulus of N to obtain a one-dimensional array O[N×K] with a size of N×K; and when O...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com