

A Tracking Method for Determining the Boundary of Local Interference Region in Free-form Surface Machining
A local interference and curved surface processing technology, applied in the field of tracking, can solve the problems of local interference, improper selection of processing tool size, low precision, etc., and achieve the effects of reducing the total length, improving the efficiency of surface processing, and simplifying calculations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0044] Example: refer to Figure 5 As shown in , a tracking method for determining the boundaries of local interference areas in free-form surface processing, specifically includes the following steps:
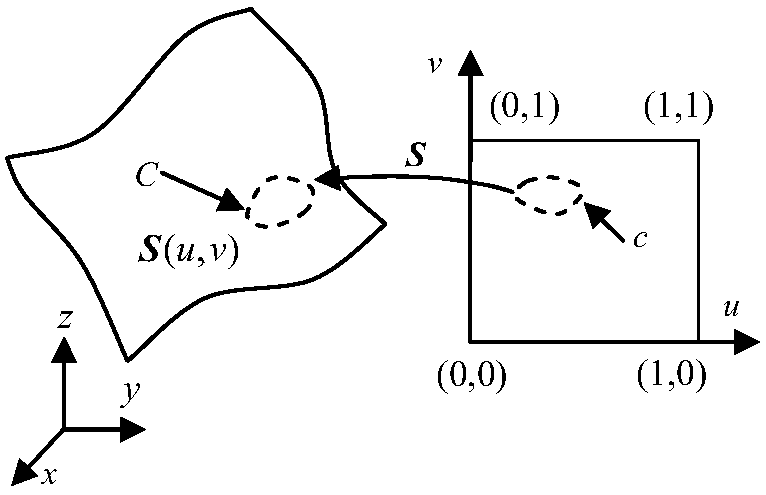
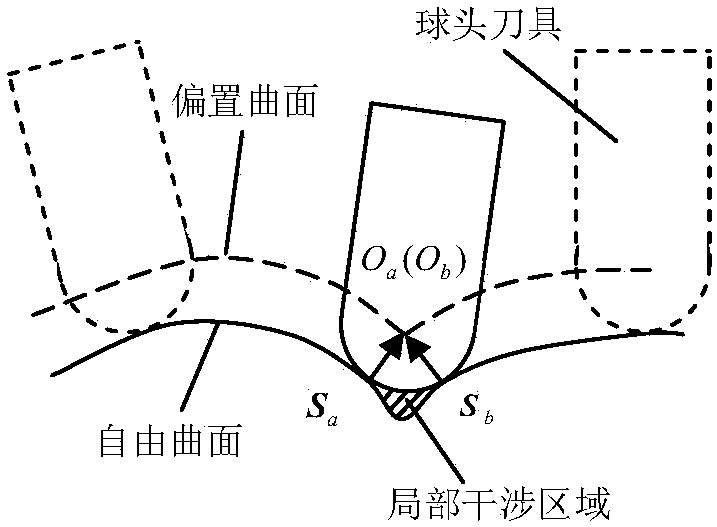
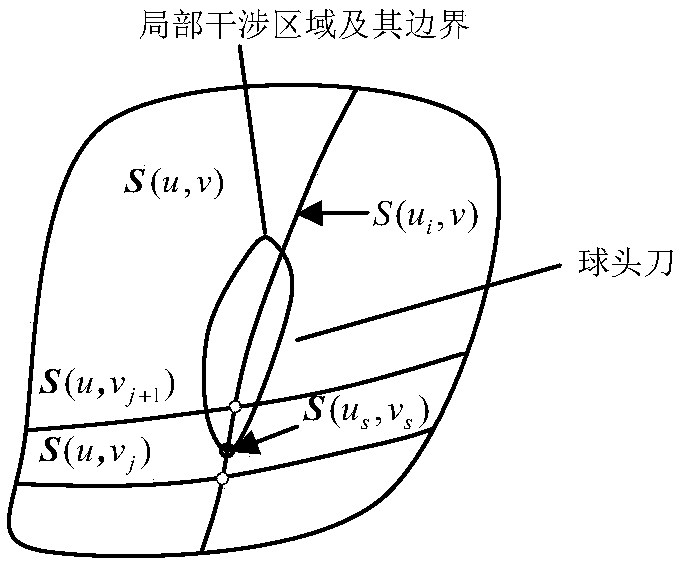
[0045] 1) Establish a free-form surface S based on point fitting of measured values (such as figure 1 shown) and the offset surface S offset , the point in the parameter plane (u 0 ,v 0 ) corresponding to the point S(u on the free-form surface S 0 ,v 0 ) and the offset surface S offset point S on offset (u 0 ,v 0 ) between the corresponding principal curvature relation is: Set the boundary tracking condition of the local interference area: k max (u,v)=k tool ; where: k m is the principal curvature on the free-form surface S; k m_offset is the offset surface S offset on the principal curvature, d is the offset surface S offset Distance to free-form surface S, k max (u, v) is the maximum principal curvature of the point on the free surface S, k tool is the ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More