Unlock instant, AI-driven research and patent intelligence for your innovation.
A comb-type branch-shaped fruit picking robot
What is Al technical title?
Al technical title is built by PatSnap Al team. It summarizes the technical point description of the patent document.
A picking robot and branch-shaped technology, which is applied in the field of combing branch-shaped fruit picking robots, can solve the problems of large size and limited application range
Active Publication Date: 2018-06-12
SHANDONG GUOXING SMARTECH CO LTD
View PDF8 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
However, the invention is bulky and needs to be attached to other mobile platforms to work, which limits the scope of application
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
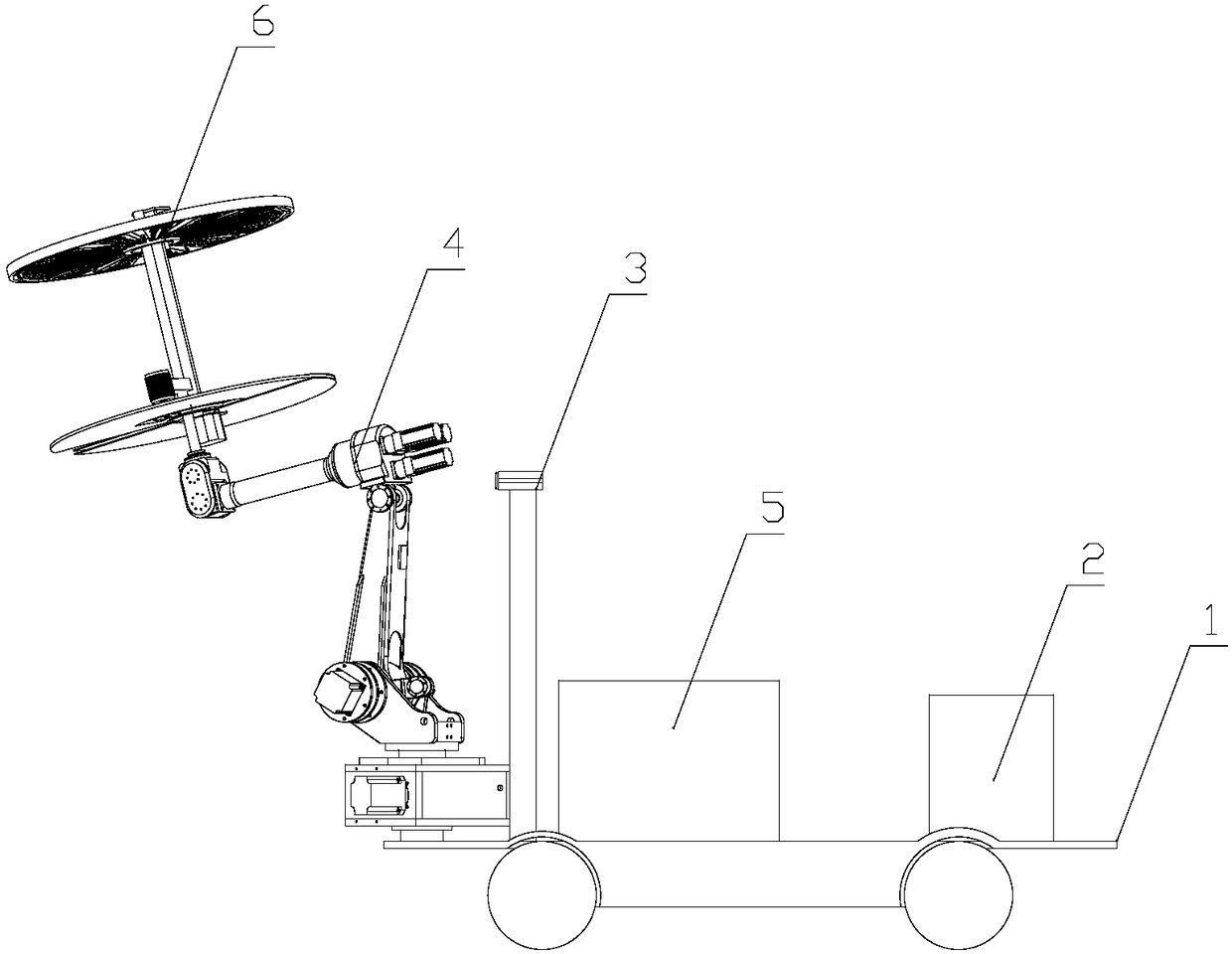
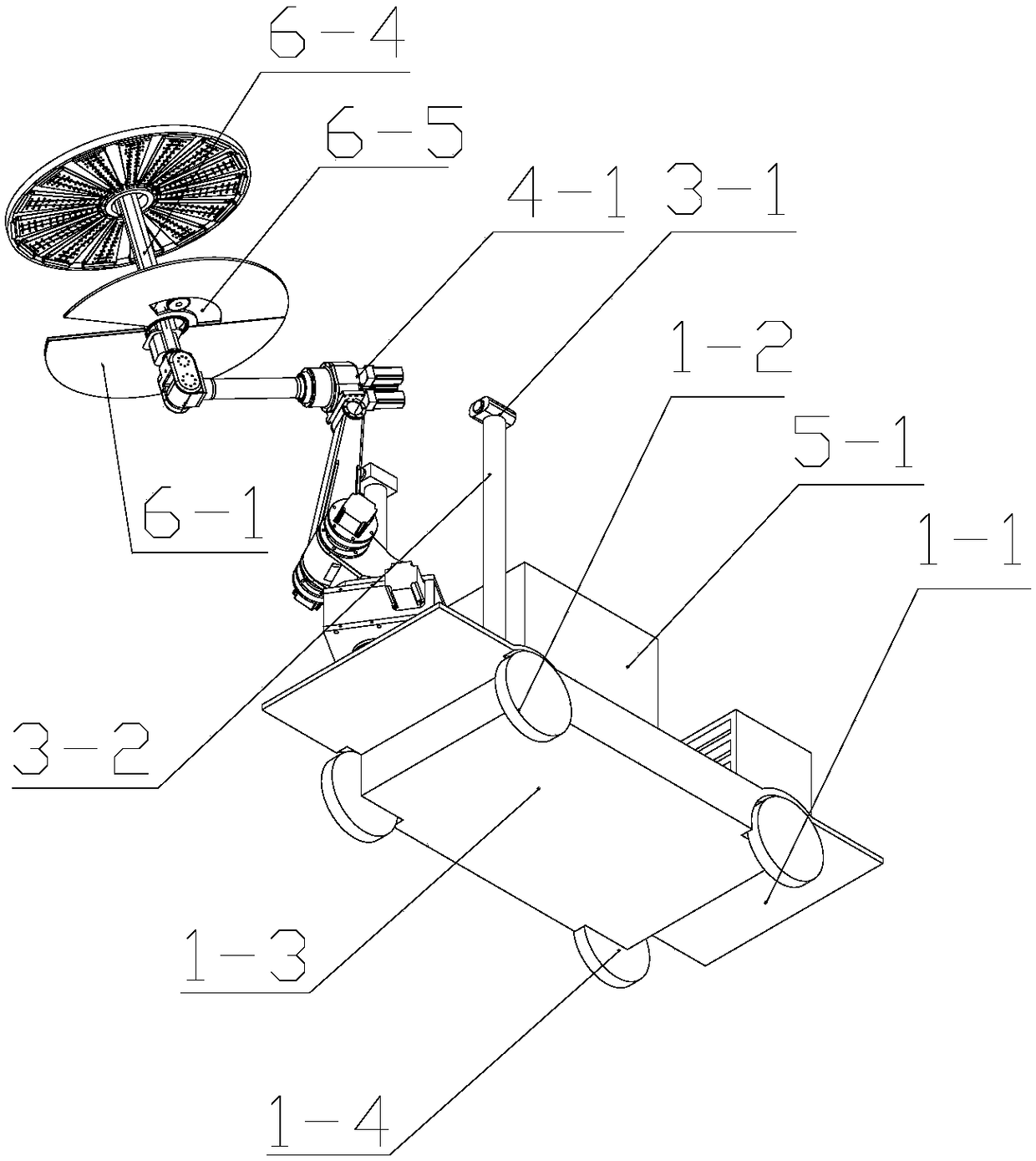
[0061] like figure 1 , 2 , 3 and 4 are shown. A combing branch-shaped fruit picking robot comprises a picking mobile platform 1 , a control cabinet 2 , a machine vision system 3 , a picking robotic arm 4 , a fruit collecting box 5 and a combing picking tray 6 . The picking mobile platform 1 is a four-wheel intelligent vehicle with a power drive device 1-1 and a steering device 1-2. The power drive device 1-1 drives the picking robot to walk in a straight line, including movements such as uniform speed, acceleration and deceleration; steering Devices 1-2 control the picking robot to perform turning functions, including left and right turns. The picking mobile platform also includes a mobile platform body, a mobile wheel, and the like.
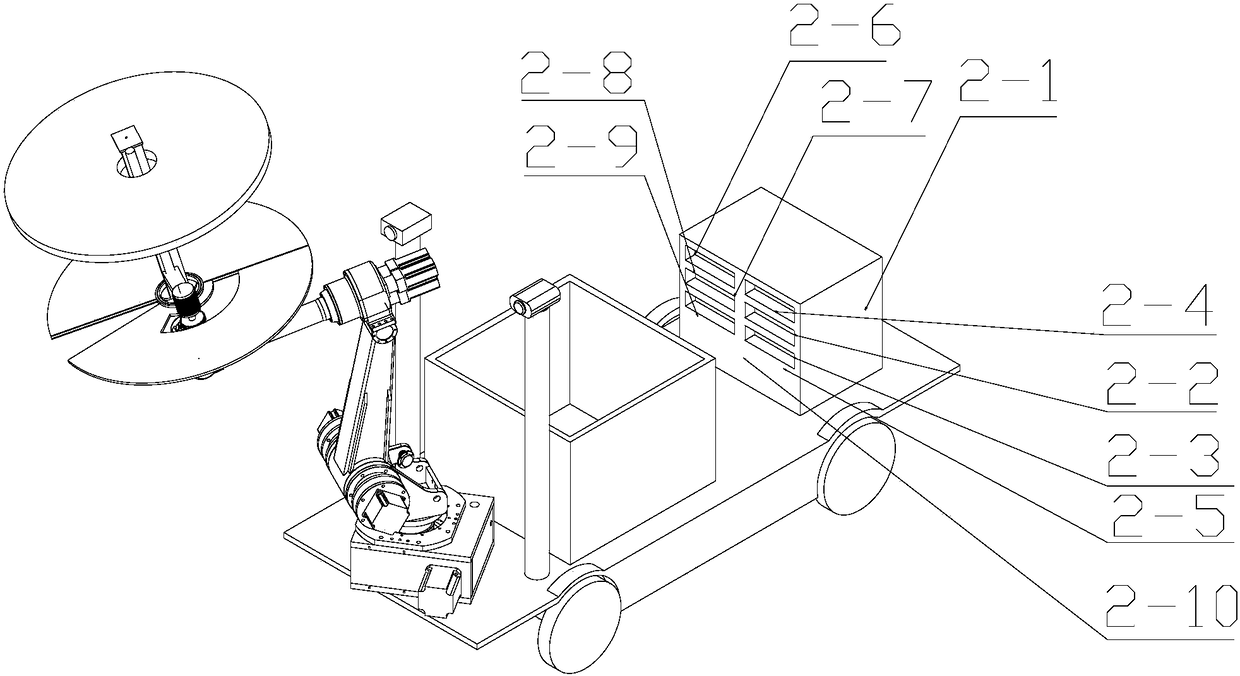
[0062] The control cabinet 2 is a rainproof cabinet that integrates all the electronic control modules of the picking robot, including a control module, a drive module and a power supply, and includes a control iron box 2-1, a main control mo...
Embodiment 2
[0081] like Figure 1-8 shown. The invention not only proposes a combing type branch-shaped fruit picking robot, but also proposes a corresponding combing type branch-shaped fruit picking method. Specific steps are as follows:
[0082] A comb-type branch-shaped fruit picking robot includes a picking mobile platform 1, a control cabinet 2, a machine vision system 3, a picking robot arm 4, a fruit collection box 5, and a comb-type picking tray 6.
[0083] S1: First, the GPS differential module 2-4 sends the collected coordinate position of the picking robot to the main control module 2-2, and the inertial navigation module also sends the navigation information to the main control module 2-2.
[0084]S2: The main control module 2-2 drives the picking mobile platform 1 to move by controlling the mobile platform driving module 2-6. The picking mobile platform 1 has a power drive device 1-1 and a steering device 1-2, and is a four-wheeled For the smart car, first, the power drive...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention relates to a carding type branched fruit picking robot which is used for efficiently picking fruits such as wolfberries, glossy privet fruits and the like which are produced on low-level branches and distributed in a strip shape and belongs to the technical field of agricultural automation and robots. The robot comprises a mobile picking platform, a control cabinet, a machine vision system, a mechanical picking arm, a fruit collecting box and a carding type picking disk, wherein the mechanical picking arm, the control cabinet, the fruit collecting box and the machine vision system are mounted on the mobile picking platform, and the carding type picking disk is mounted on the mechanical picking arm. Existing general mechanical picking arms are abandoned, the self-developed carding type picking disk for branched fruit picking is used for picking the fruits, the robot is simple, reliable and efficient, and the picking efficiency can be greatly improved. The robot greatly promotes rural economic development and has inestimable significance in improving modernization and intelligentialization of Chinese agriculture and accelerating scientific progress of agriculture.
Description
technical field [0001] The invention relates to a combing-type branch-shaped fruit picking robot for efficiently picking fruits such as wolfberry and privet root on low-altitude branches and presenting a band-like distribution, and belongs to the field of agricultural automation and robotics technology. Background technique [0002] Lycium barbarum is a general term for the species of Lycium barbarum, such as commercial Lycium barbarum, plant Ningxia Lycium barbarum, Chinese Lycium barbarum and so on. Ningxia wolfberry has the largest cultivation area in China. The branches of Lycium barbarum are covered with hard thorns, which increases the difficulty of picking. Special long scissors with curved nose are used to carefully cut off the branches and trunks in the dense wood thorns, keep the fruit stalk, and quickly collect the intact and undamaged Lycium barbarum , and use scientific technology to make dry storage within 24 hours. However, this kind of picking efficiency is...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.

 Login to View More
Login to View More  Login to View More
Login to View More