

Turning structure of 2d quadruped robot
A quadruped robot and robot technology, which is applied in the fields of toys, rehabilitation medicine, military, and robotics, can solve the problems of lack of lateral movement of the hip joint and the inability of 2D biped robots to turn and walk normally, and achieve low-complexity effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] Hereinafter, preferred embodiments of the present invention will be described in detail with reference to the accompanying drawings. It should be understood that the preferred embodiments are only for illustrating the present invention, but not for limiting the protection scope of the present invention.
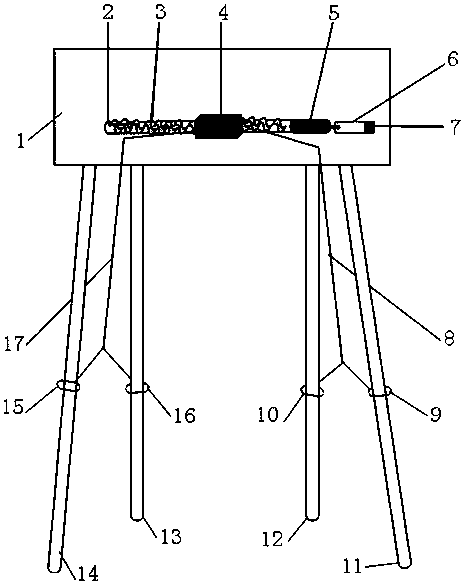
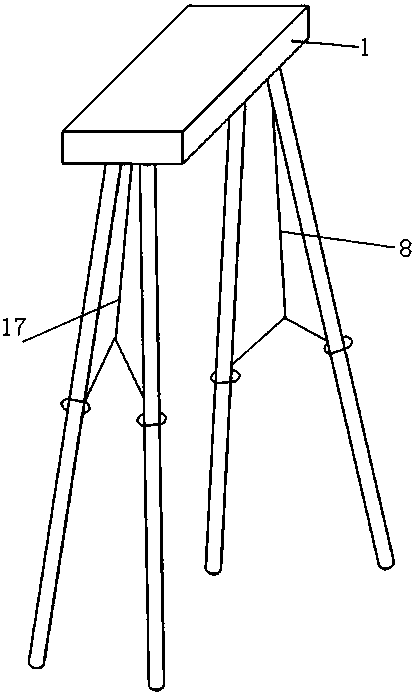
[0014] The 2D quadruped robot to which the present invention is applicable is a legged robot with a bifurcated leg structure, such as figure 1 and figure 2 shown. see figure 1 , the turning structure of a 2D quadruped robot, including straight legs I14, straight legs II13, straight legs III12, straight legs IV11, and the upper part of the robot set on the straight legs I14, straight legs II13, straight legs III12 and straight legs IV11 The platform 1 is characterized in that it also includes a ball screw 2 installed on the upper platform 1 of the robot, a coupling 5, a motor 6, a wire drawing I17 and a wire drawing II 8, and the ball screw 2 is composed of a screw ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More