

Mechanical structure of humanoid walking line inspection robot and its obstacle surmounting method
A line-following robot and mechanical structure technology, applied in the field of robotics, can solve problems such as unstable operation, falling, and lack of obstacle-crossing functions, and achieve the effect of simple and compact structure and low weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to make the technical problems, technical solutions and advantages to be solved by the present invention more clear, the following will be described in detail with reference to the accompanying drawings and specific embodiments.
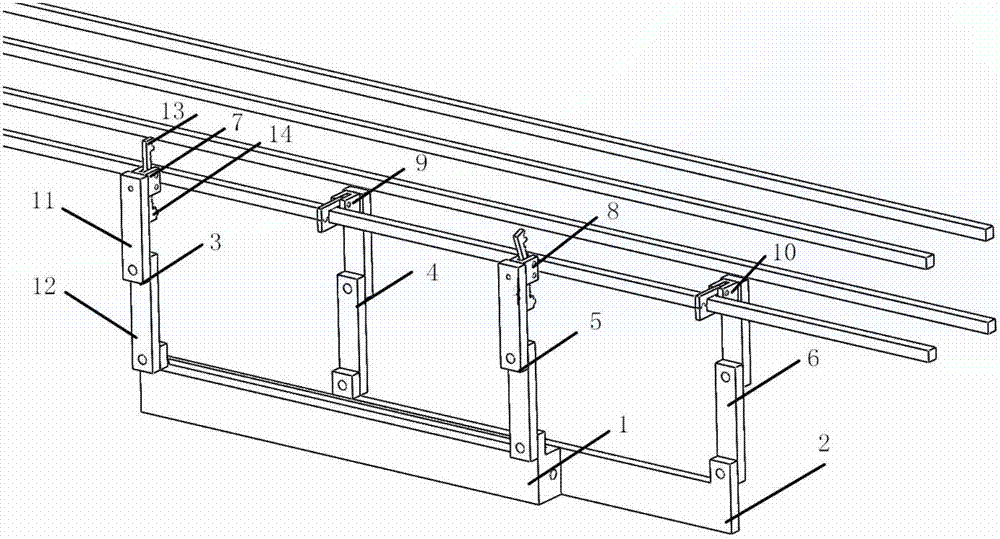
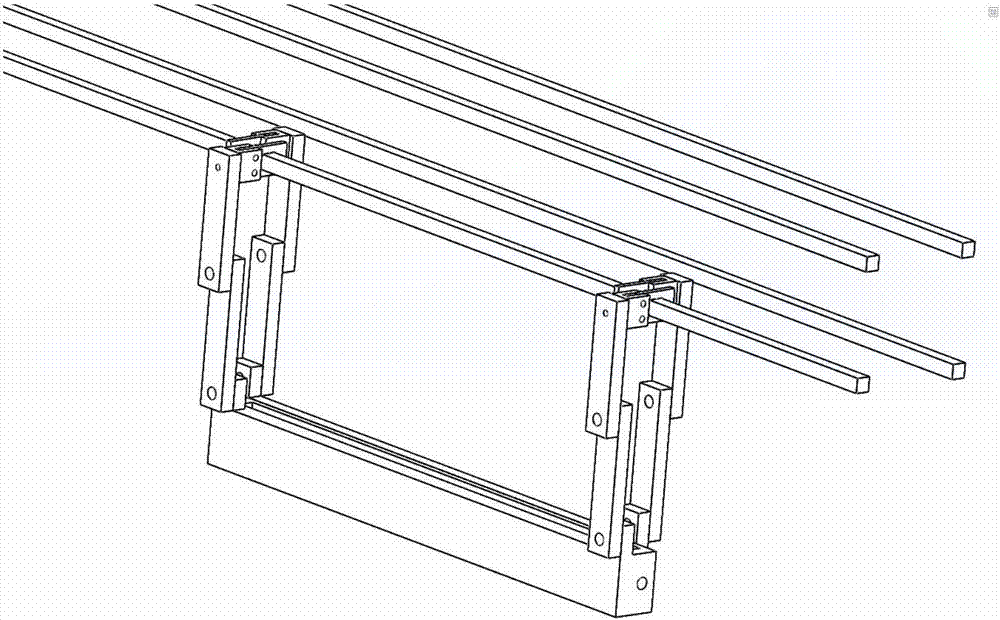
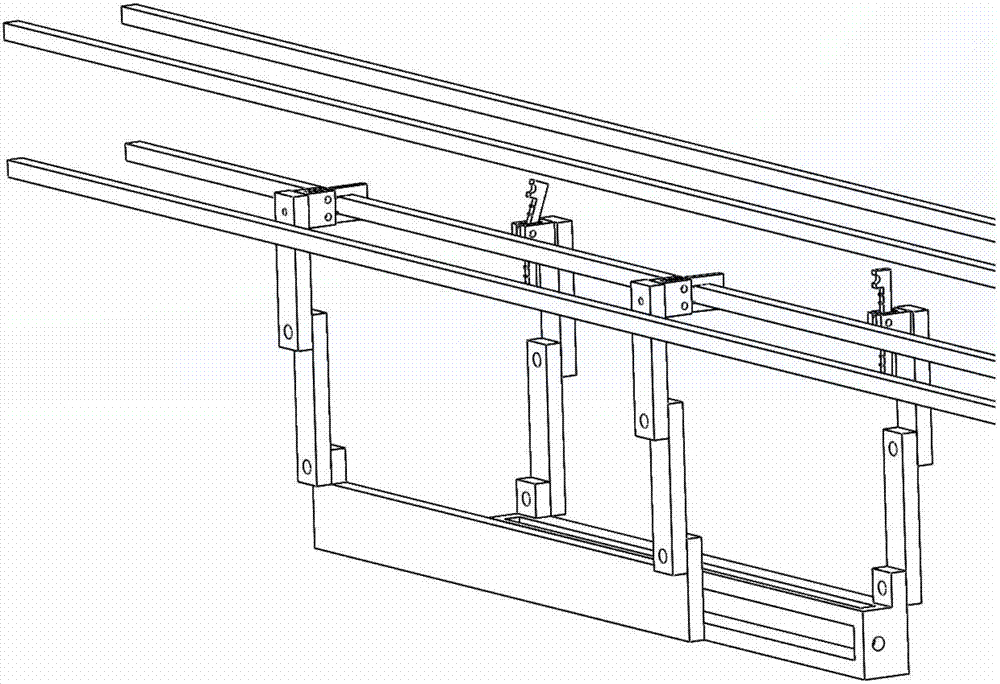
[0019] On the one hand, the present invention provides a mechanical structure of a humanoid walking type line-following robot, such as figure 1 As shown in the figure, including a frame, the frame is a split structure, including a first frame 1 and a second frame 2 that are arranged left and right and can slide back and forth relative to each other. The four corners of the frame are respectively provided with flexible and extensible mechanical arms. The arms include a first robotic arm 3 and a second robotic arm 4 located on the first rack 1, and a third robotic arm 5 and a fourth robotic arm 6 located on the second rack 2. The robotic arms are respectively provided with A manipulator for grasping lines from both sides, the manipulato...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More