

Method for controlling transport robot to autonomously enter elevator
A robotic and autonomous technology, applied in electrical program control, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems of easy interference in the control process, low safety performance of elevator control, etc., and achieve a high success rate , High recognition, ensure the effect of judgment accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
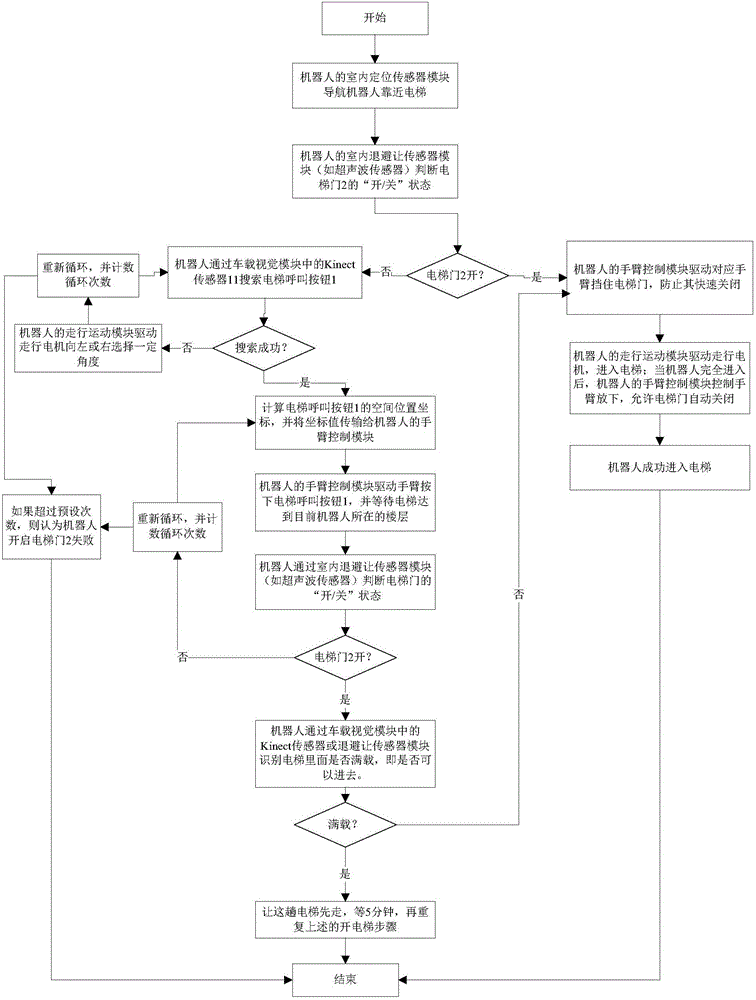
[0035] Such as figure 1 Shown is a control method for a transport robot autonomously entering an elevator according to the present invention, comprising the following steps:
[0036] Step 1: When the mobile robot runs to the front of the elevator door 2, the robot uses the ultrasonic sensor in the indoor retreat sensor module on its own vehicle to judge the switch state of the elevator door;
[0037] Step 2: If the elevator door is in the "open" state, the robot uses the arm control module to drive the corresponding robot arm to block the elevator door to prevent it from closing automatically, and at the same time, the robot controls the walking motor in the walking motion module to enter the elevator;
[0038] During the process of entering the elevator, one of the raised arms of the robot is kept raised to trigger the elevator's infrared sensor so th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More