

An automatic grabbing manipulator for rock-soil masonry
A technology for grabbing manipulators and masonry masonry, applied in the directions of manipulators, claw arms, chucks, etc., can solve the problems of low grabbing efficiency, slow grabbing speed, low construction efficiency, etc., and achieve high grabbing efficiency and grabbing speed. Fast and efficient construction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
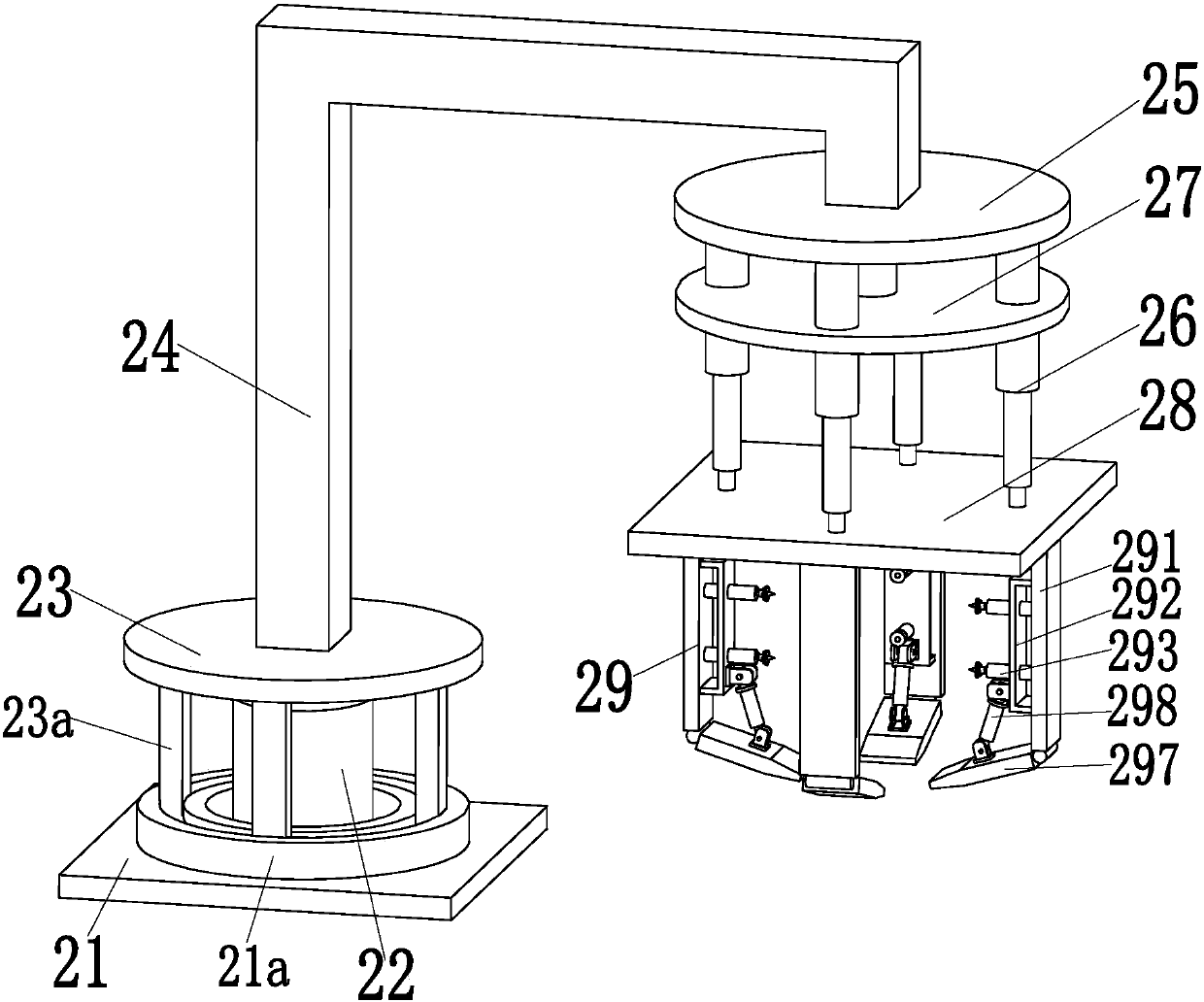
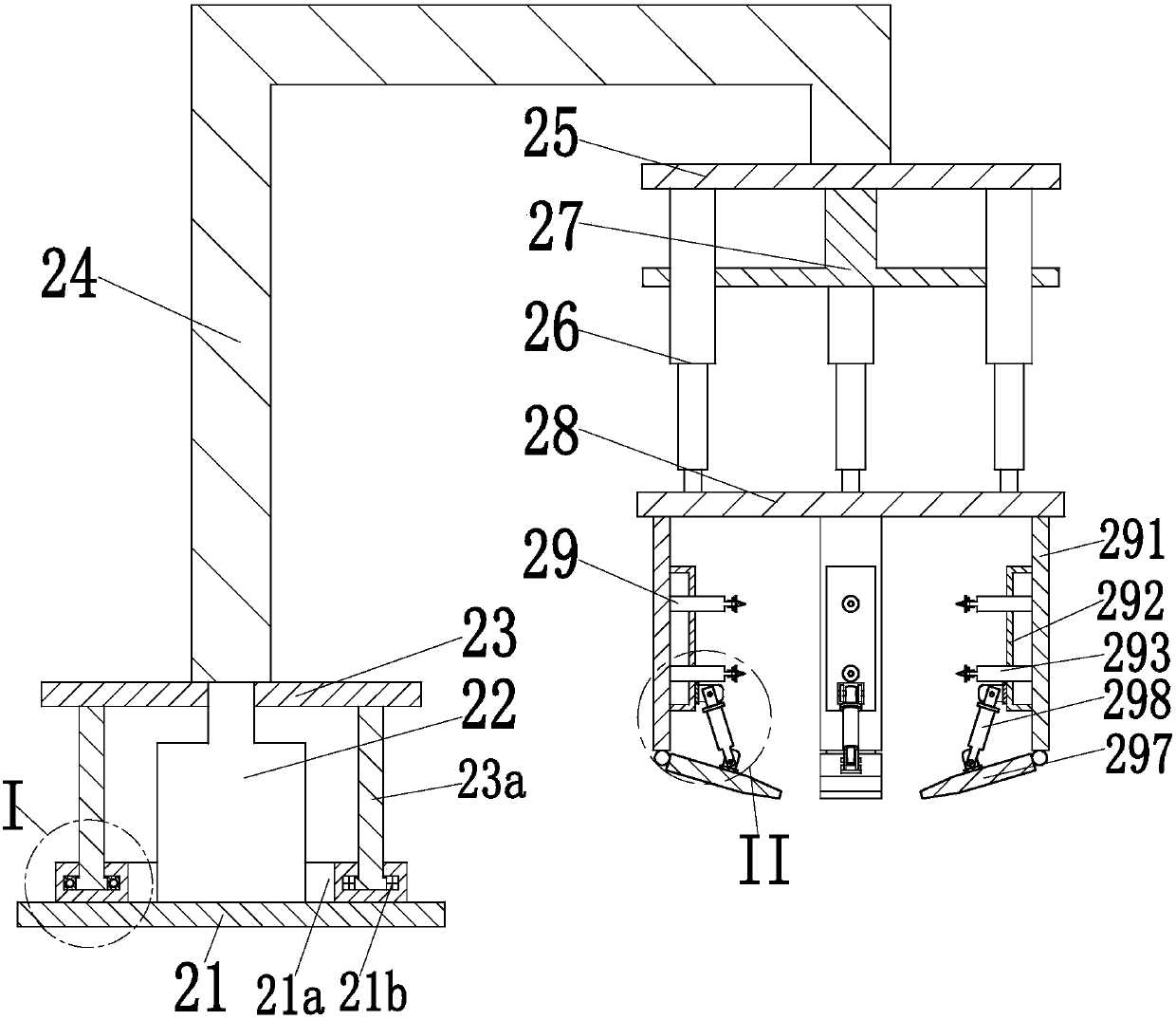
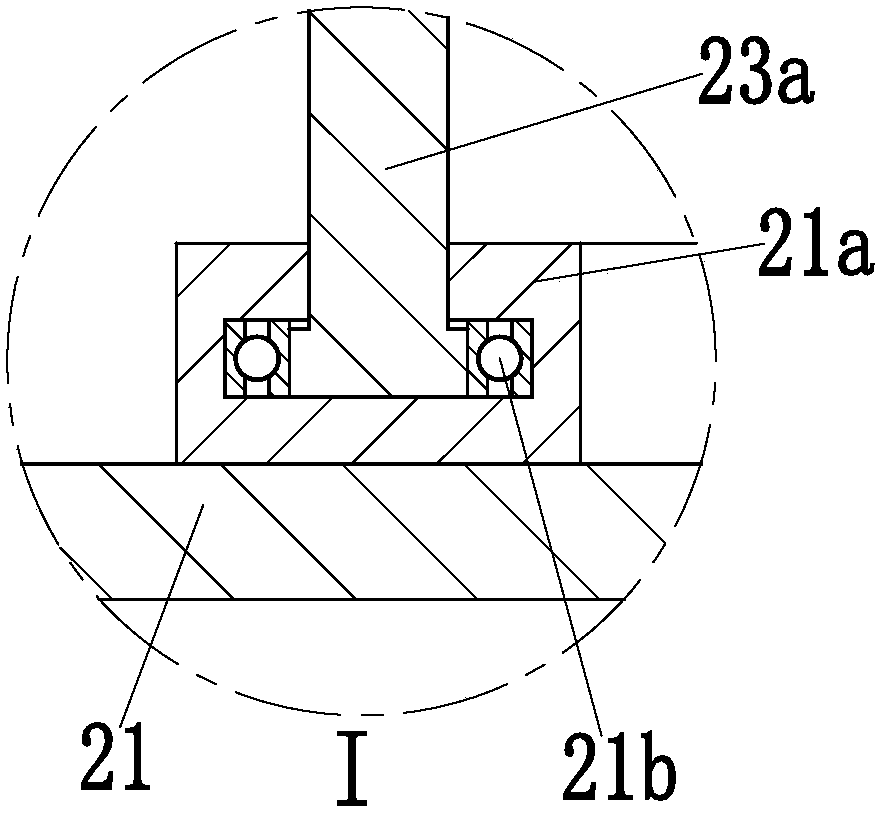
[0015] like Figure 1 to Figure 4 As shown, an automatic grasping manipulator for rock-soil masonry includes a rotating base plate 21, a rotating motor 22 is installed on the middle of the upper end surface of the rotating base plate 21 through a motor base, and a rotating motor is fixedly installed on the output shaft of the rotating motor 22. Table 23, the lower end surface of the rotary table 23 is evenly provided with four T-shaped sliding columns 23a along the axial direction; The two ends of the type spool 23a are respectively connected by two rotary bearings 21b, and the rotary chute 21a and the four T-shaped spools 23a play a good position-limiting support role, and the two rotary bearings 21b make the rotation motor 22 The driven four ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More