

Walking state identification method based on space vector between human body skeleton joints
A space vector and state recognition technology, applied in character and pattern recognition, instruments, computer parts, etc., can solve problems such as inability to monitor it at any time, loss, and difficulty in immediate discovery by the owner
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The specific implementation manners of the present invention will be described in detail below in conjunction with the accompanying drawings.
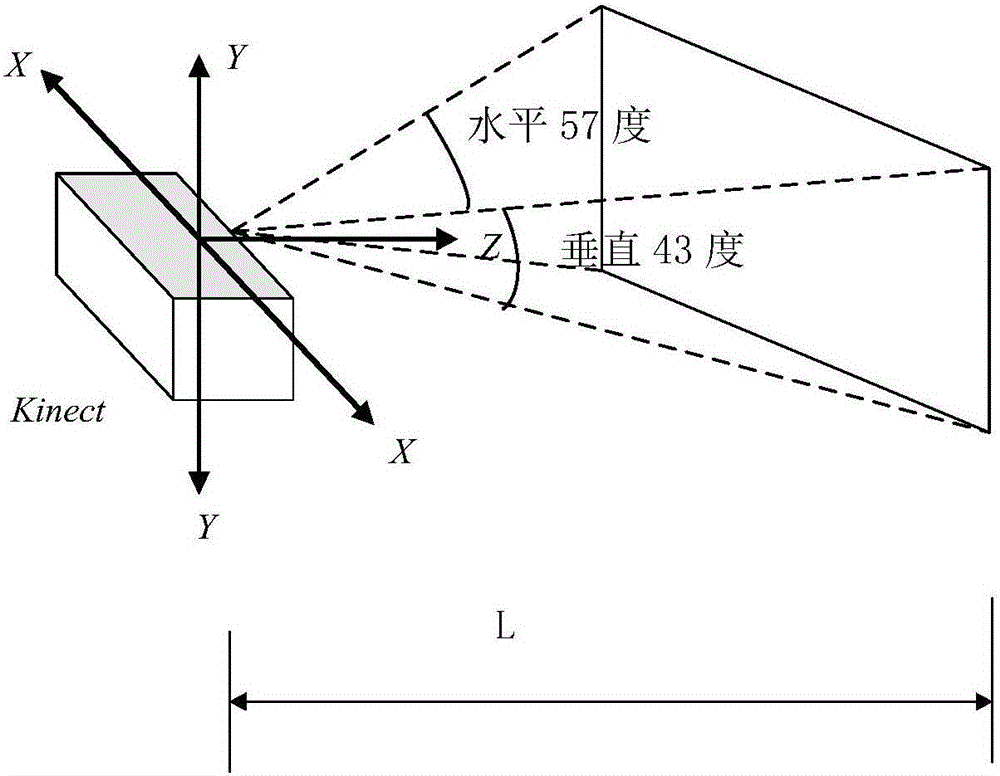
[0031] In this embodiment, the follow-up service robot carries the Kinect camera into the scene. In order to ensure that the follow-up service robot follows the target person in front of the target person according to the walking state of the human body, the walking state recognition method based on the space vector between the joint points of the human skeleton is adopted in the present invention. , to identify the walking state of the target person in real time, and the following service robot follows the target person according to the walking state of the human body. As a 3D somatosensory camera, the Kinect camera has introduced functions such as real-time motion capture, image recognition, microphone input, voice recognition, and community interaction. It is one of the commonly used devices in the field of human-computer inte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More