

High-precision camera calibration method via low-precision 2D planar target
A two-dimensional plane, camera calibration technology, used in image analysis, image enhancement, instrumentation, etc., can solve the problem of high cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings of the specification.
[0041] The invention discloses a method for realizing high-precision camera calibration with a low-precision two-dimensional plane target, which specifically includes the following steps:
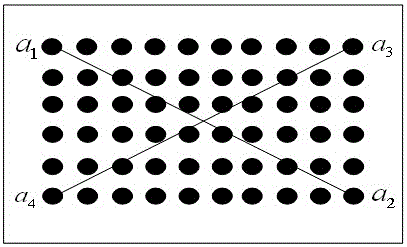
[0042] Step 1: Make a calibration board, such as image 3 As shown, it is assumed that there are a total of l control points on the calibration board, and the control point is the center of each circle. Take the center of the calibration plate as the origin, the horizontal right is the X axis, the horizontal downward is the Y axis, and the vertical calibration plate plane is the Z axis. The initial value of the coordinate of each control point in the world coordinate system is (X wi ,Y wi ,Z wi ), i=1, 2,...l (l≥8). Where Z wi All are initialized to 0. At the same time, accurately measure the distance between two control points wi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More