Map representation method for robot indoor autonomous navigation
A technology for autonomous navigation and robotics, applied in navigation, mapping and navigation, navigation calculation tools, etc., to achieve the effect of improving efficiency and path accuracy and reducing hardware costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings and examples. The following examples are used to illustrate the present invention, but should not be used to limit the scope of the present invention.
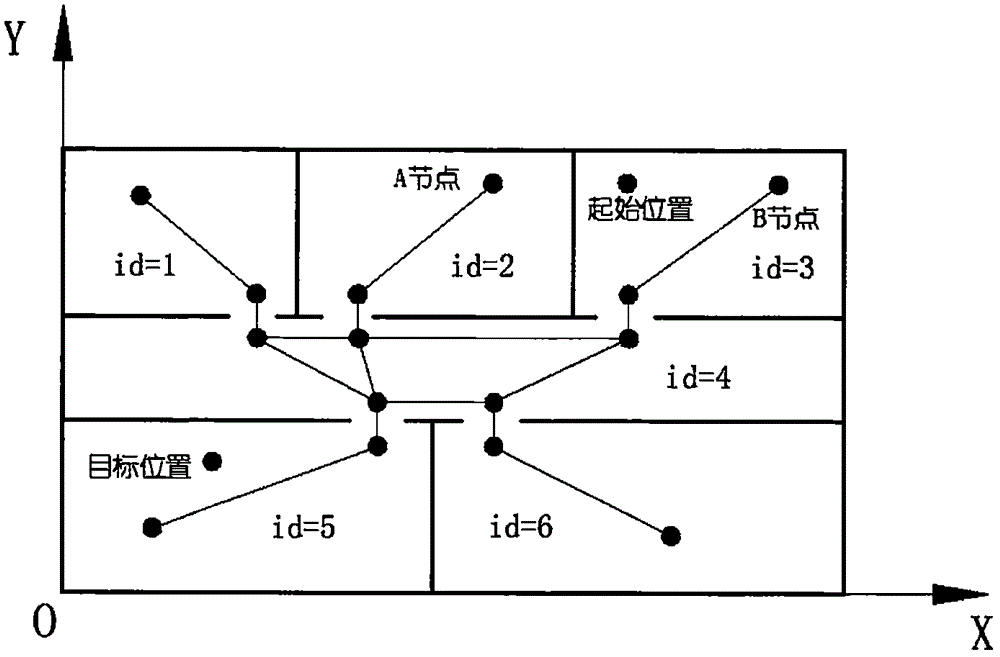
[0024] Such as figure 1 As shown, the map representation method of the indoor group main navigation of the robot in this embodiment includes the following steps:
[0025] S1. When the robot is in an unfamiliar indoor environment, according to SLAM or other methods, the grid map of the indoor space is obtained, and the grid map of the indoor space is used as the prior map of the robot's autonomous navigation. The indoor space is divided into multiple indoor area.
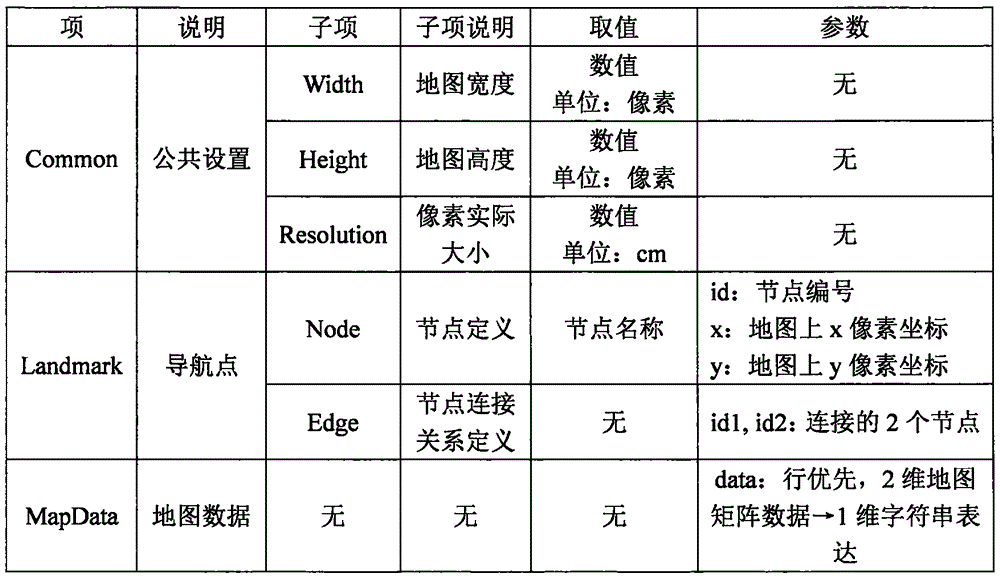
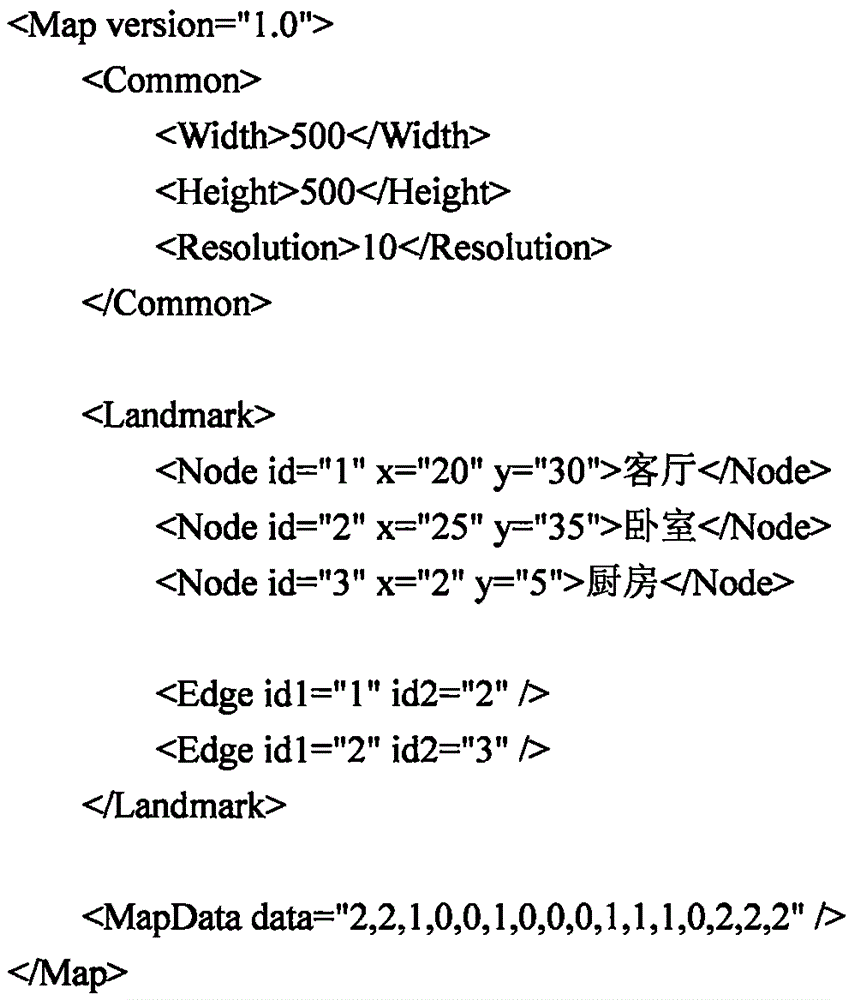
[0026] S2. Set a plurality of navigation landmarks in the process of initializing the map, the data of the navigation landmarks includes the number representing the position coordinates of the navigation landmarks in the global map coo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More