

An exoskeleton-based wearable lower limb rehabilitation robot
A rehabilitation robot and wearable technology, which is applied in the direction of tools to help people walk, physical therapy, etc., can solve the problems of single function, insufficient anthropomorphic structure design of the lower limb rehabilitation robot, and large volume of the lower limb rehabilitation robot, so as to improve the comfort. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
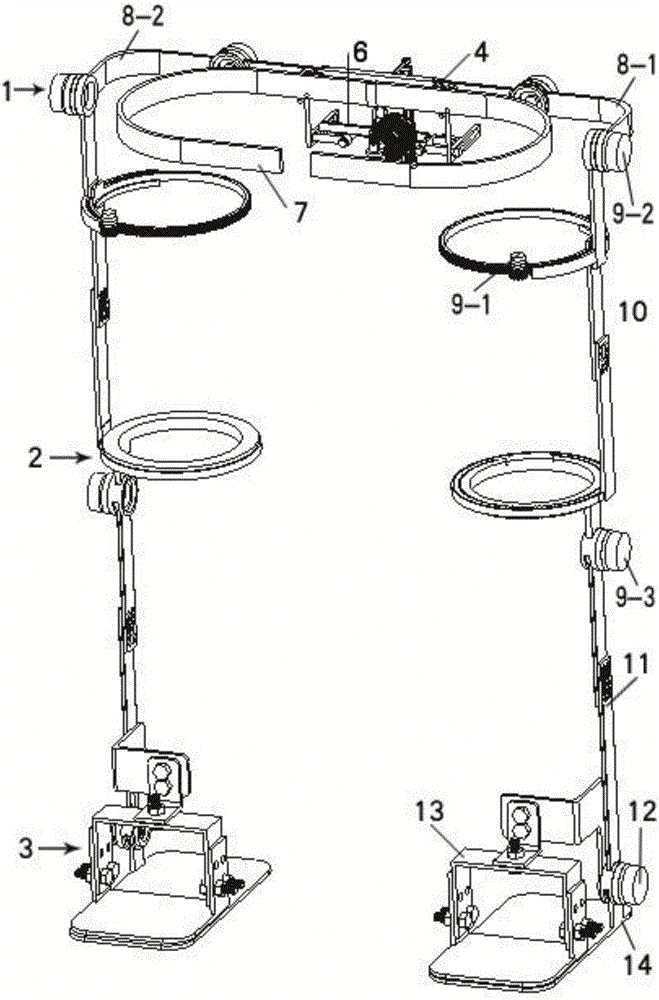
[0037] combine figure 1 In this embodiment, the exoskeleton-based wearable lower limb rehabilitation robot drives the wearer to perform lower limb rehabilitation walking training as an example. The exoskeleton-based wearable lower limb rehabilitation robot includes a waist device 1, a leg device 2 and a foot device 3, respectively It is tied or worn on the waist, legs and feet of the human body through flexible straps, and the movement of the exoskeleton drives the corresponding parts of the human body for walking rehabilitation training.
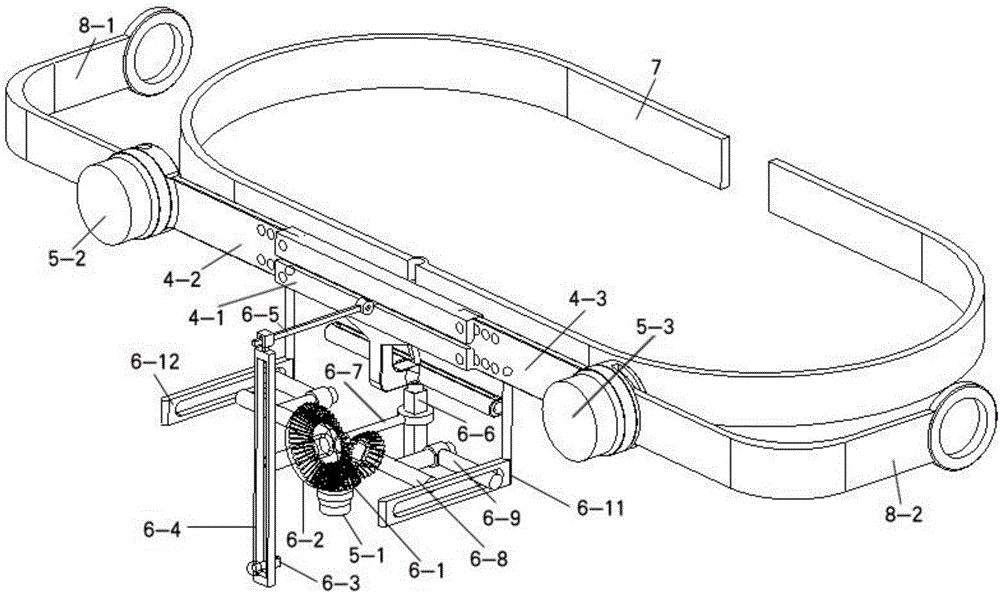
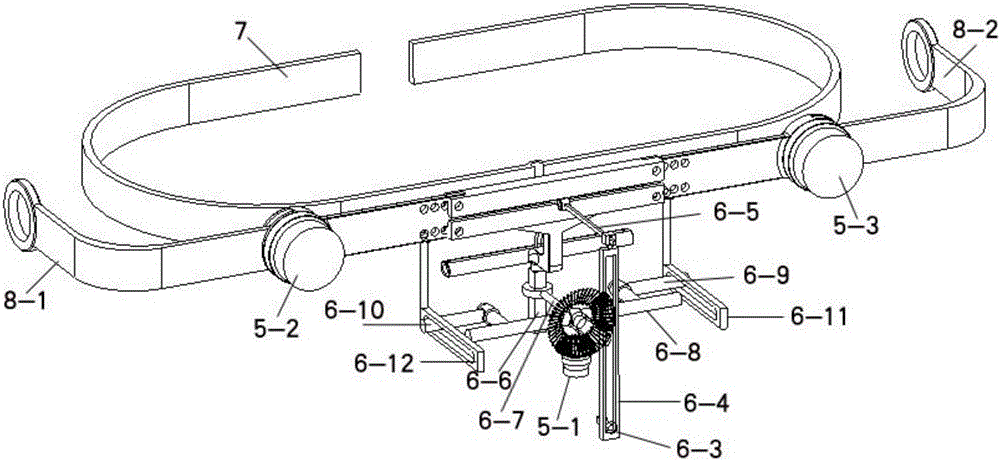
[0038] Referring to Fig. 2, in the waist device 1, the width of the waist mechanism is adjusted by adjusting the positions of the first sliding member 4-2 and the second sliding member 4-3 on the middle support member, and the width of the waist mechanism is adjusted by adjusting the connection member 6-7 on the middle support member 4. -1 position to adjust the height of the waist mechanism; the first waist driving device 5-1 drives the la...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More