

Mechanical arm planning method suitable for visual information guiding under multi-constrained condition
A visual information and robotic arm technology, applied in manipulators, manufacturing tools, etc., can solve the problems of not considering visual information guidance and binocular camera robotic arm planning segmentation strategy, difficult to meet robotic arm online planning requirements and other problems, to ensure Feasibility and effectiveness, improving safety, preventing the effect of blocking the field of view
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solution of the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by those skilled in the art without making creative efforts belong to the protection scope of the present invention.
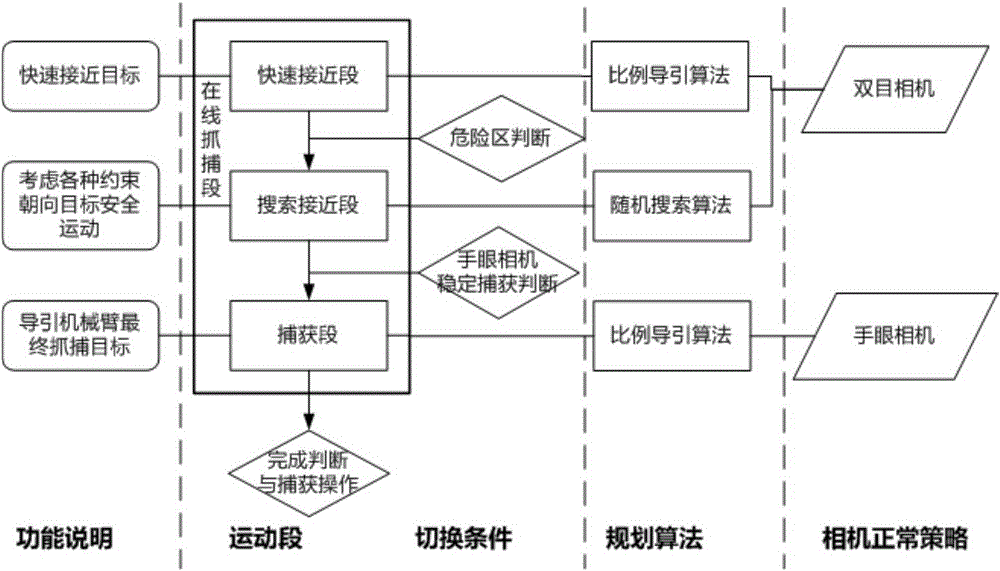
[0038] Considering the rapidity and safety of space moving target capture, the online capture segment is divided into three stages: fast approach segment, search approach segment and capture segment, such as figure 1 shown. Among them, the fast approach segment and the search approach segment refer to the process in which the manipulator approaches the target through the binocular camera and makes the hand-eye camera capture the target; the capture segment refers to the process in which the hand-eye c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More