Single-leg robot jumping mechanism with active ankle joint and bionic foot
A robot and ankle joint technology, applied in the field of robotics, can solve problems such as weak energy storage capacity, inability to realize hip-knee cooperative work, and inability to realize ankle joint energy storage, etc., to achieve the effect of reducing impact and improving exercise ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be further described below in conjunction with accompanying drawings and examples.
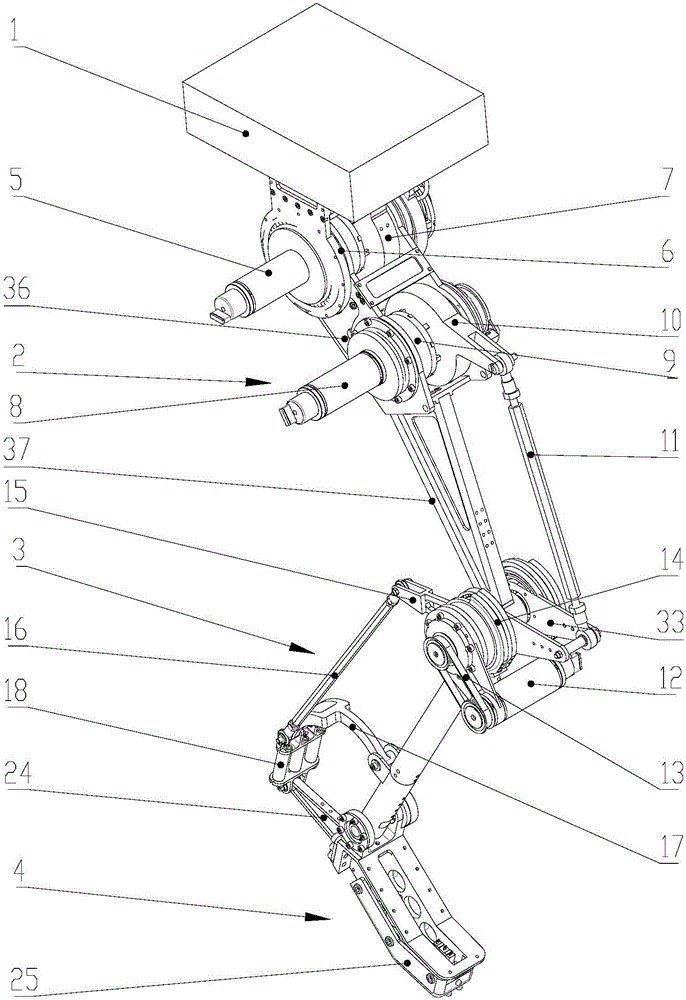
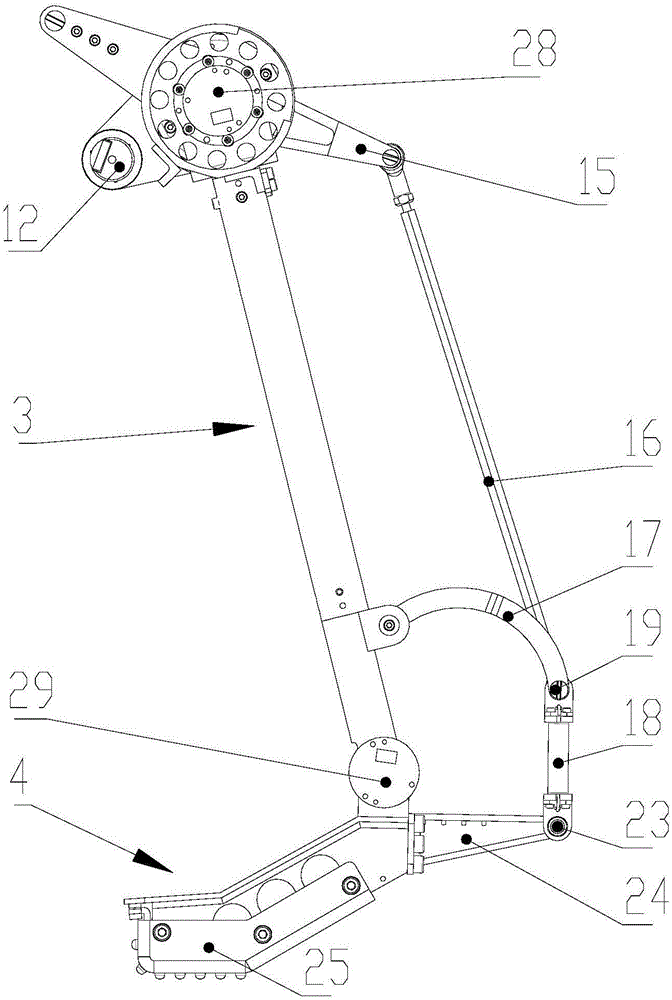
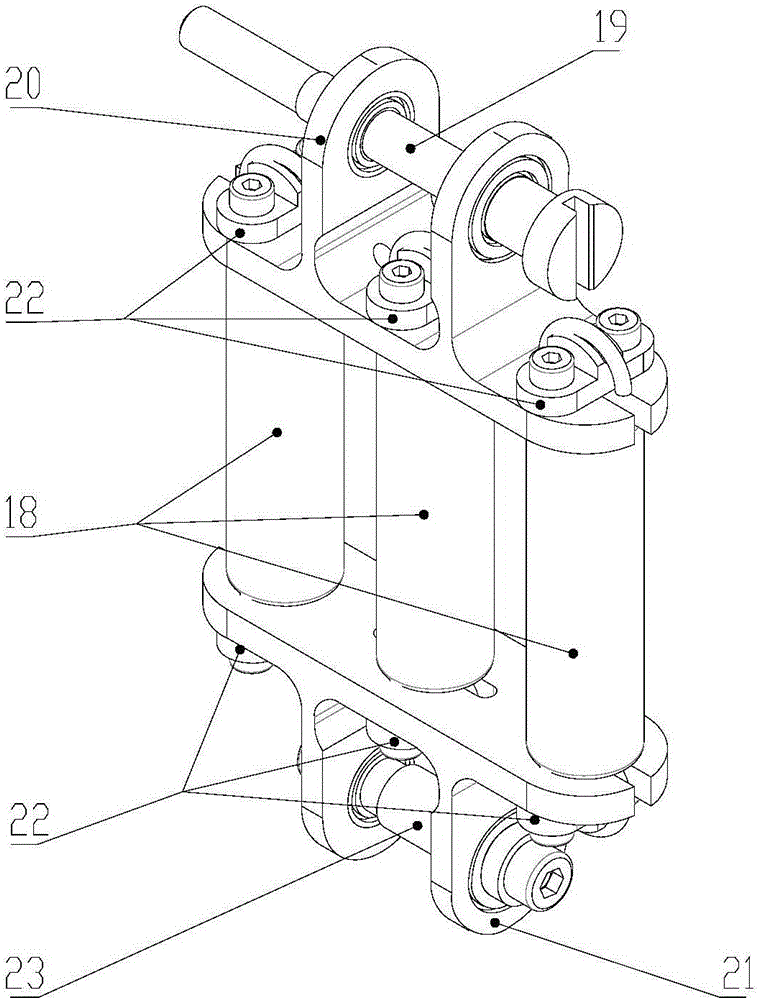
[0051] like Figure 1-6 As shown, a single-leg robot jumping mechanism with an active ankle joint and a bionic foot includes sequentially hinged fuselage 1, thigh 2, calf 3 and foot 4, and the hinge between the fuselage 1 and thigh 2 is provided There is a directional driving device for driving the thigh 2 to rotate, and the thigh 2 is provided with a first jumping driving device for driving the calf 3 to rotate. The upper end of the calf 3 has a calf top plate 33 hinged to the lower end of the thigh 2, and the calf top plate is connected to the first A knee joint transmission rod 11 is arranged between the jump driving devices, and the two ends of the knee joint transmission rod 11 are respectively hinged with the lower leg top plate 33 and the first jump driving device, and the hinged joint of the thigh 2 and the lower leg 3 is provided with a driving calf j...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More