

A fast and robust indoor positioning method for robots based on panoramic vision
A panoramic vision and high robustness technology, applied in the direction of instruments, measuring devices, surveying and navigation, etc., can solve the problems of relatively high light requirements, poor robustness, difficult to apply, etc., to achieve streamlined search area and precise positioning capabilities , The effect of shortening the operation time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in detail below in conjunction with the accompanying drawings.
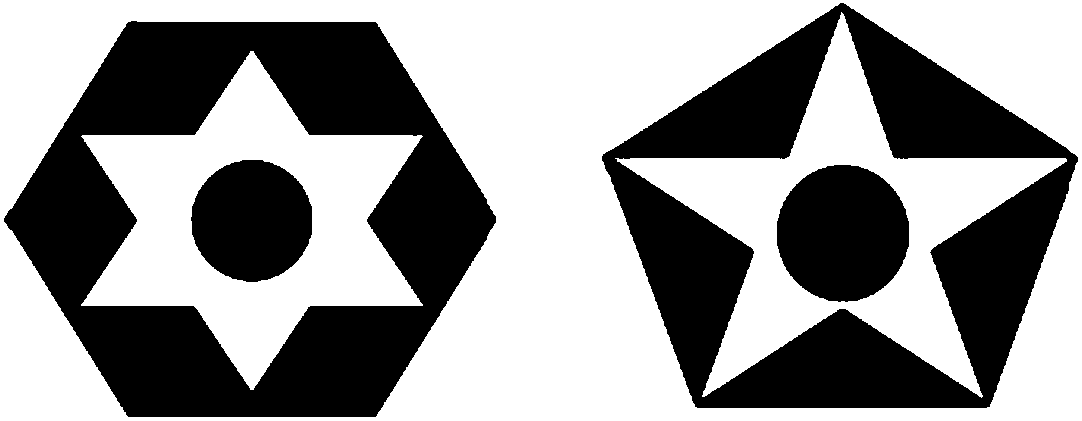
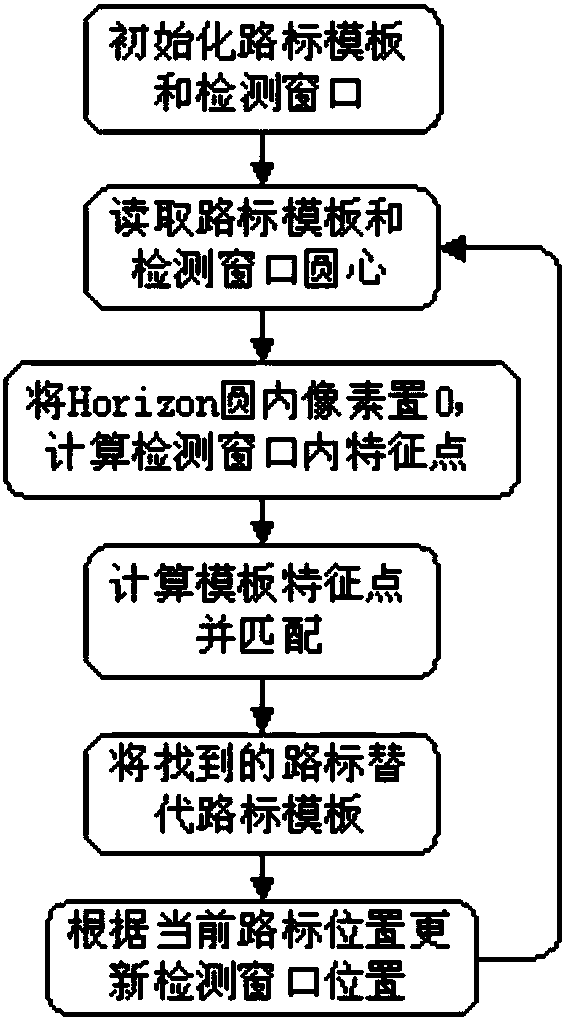
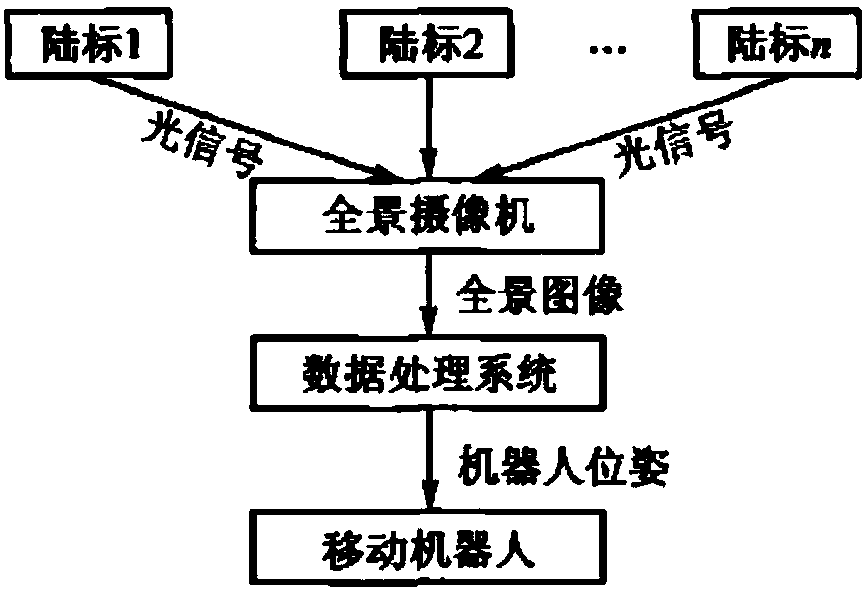
[0027] The present invention designs a fast and highly robust indoor positioning method for mobile robots based on artificial landmarks, including artificial landmark design, landmark recognition algorithms and positioning algorithms based on panoramic vision. Aiming at the problem that color road signs are greatly affected by light intensity, road signs that are beneficial to feature point recognition are designed, and an artificial road sign recognition algorithm based on feature points is proposed. The problem that the recognition algorithm is affected by the light intensity; for the misrecognition problems caused by factors such as the large amount of calculation of the feature extraction of the panoramic image, the image distortion, the change of the viewing angle and the complex environment, the traditional feature point matching algorithm is improved, and the d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More