

Multi-rotor unmanned aerial plane navigation positioning system
A multi-rotor UAV, navigation and positioning technology, applied in satellite radio beacon positioning systems, radio wave measurement systems, measurement devices, etc. Accurate positioning requirements, solving large positioning errors, and ensuring the effect of high-precision positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0024] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
[0025] It should be noted that all expressions using "first" and "second" in the embodiments of the present invention are to distinguish two entities with the same name but different parameters or parameters that are not the same, see "first" and "second" It is only for the convenience of expression, and should not be construed as a limitation on the embodiments of the present invention, which will not be described one by one in the subsequent embodiments.
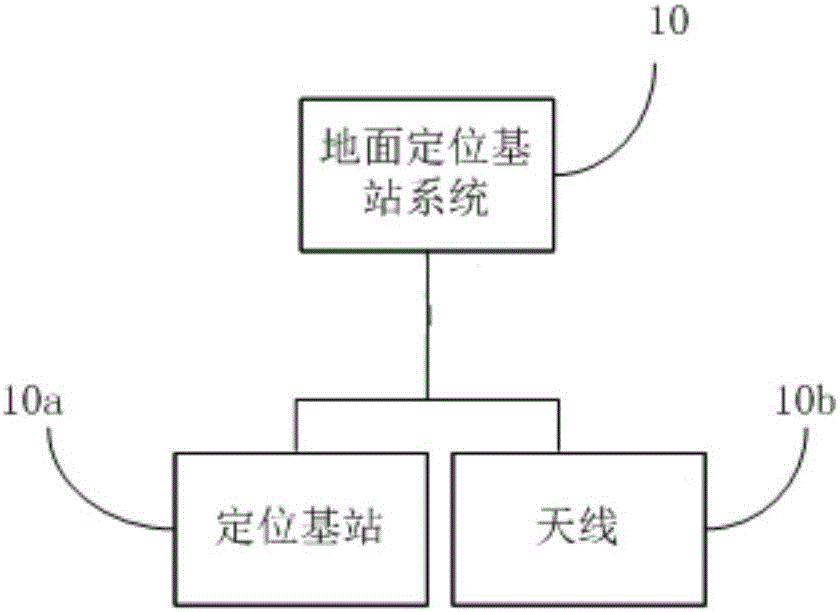
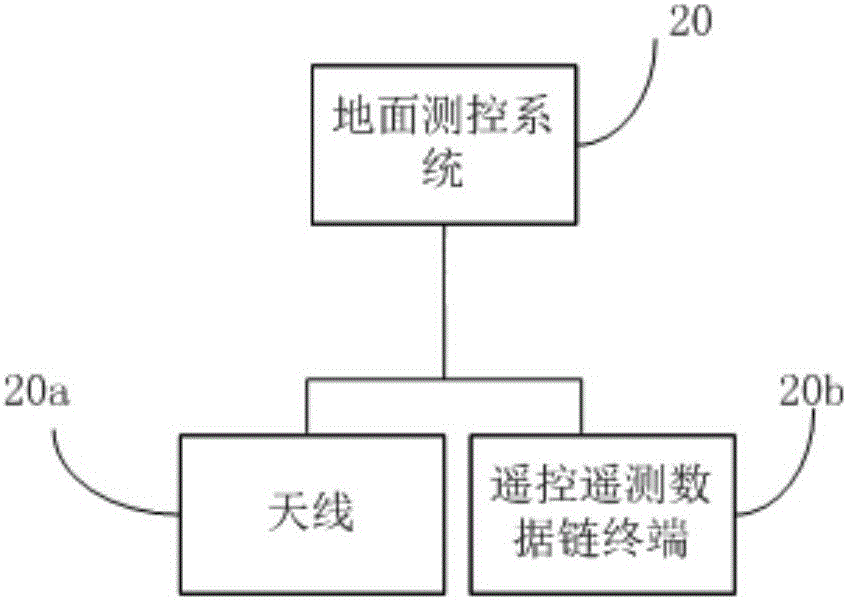
[0026] Such as figure 1 As shown, it is a schematic diagram of a multi-rotor UAV navigation and positioning system provided by an embodiment of the present invention, which includes: a ground positioning base station system 10, a ground measurement and control system ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More