

Latitude Unknown Self-alignment Method of Strapdown Inertial Navigation System under Dynamic Interference Conditions
A strapdown inertial navigation and latitude technology, which is used in navigation, measurement devices, and instruments through velocity/acceleration measurement. It can solve problems such as inability to obtain accurate system models, poor Kalman filtering effect, and difficulty in knowing system characteristics. , to prevent the divergence of filter results, fast filter convergence, and improve the accuracy of the solution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
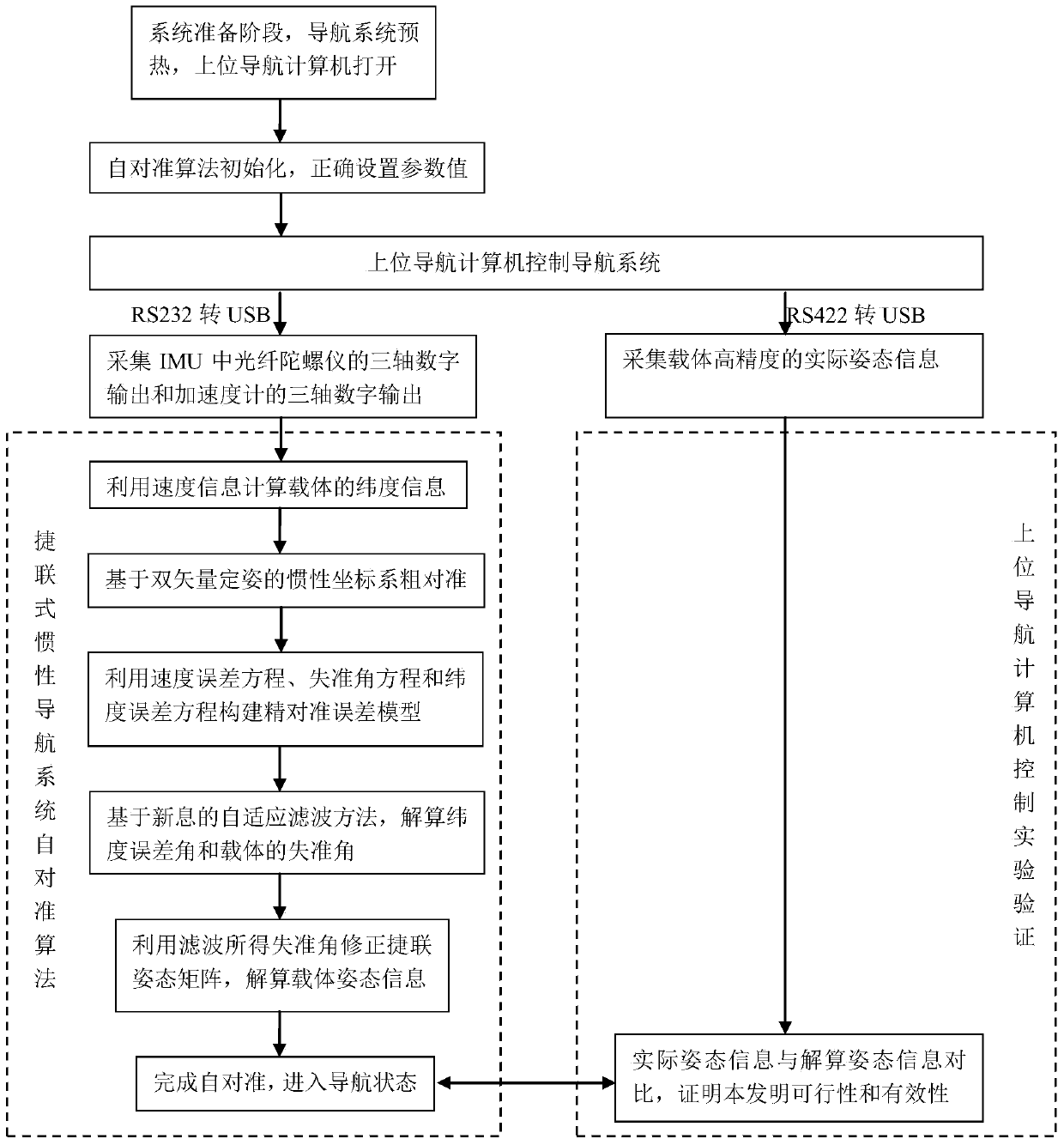
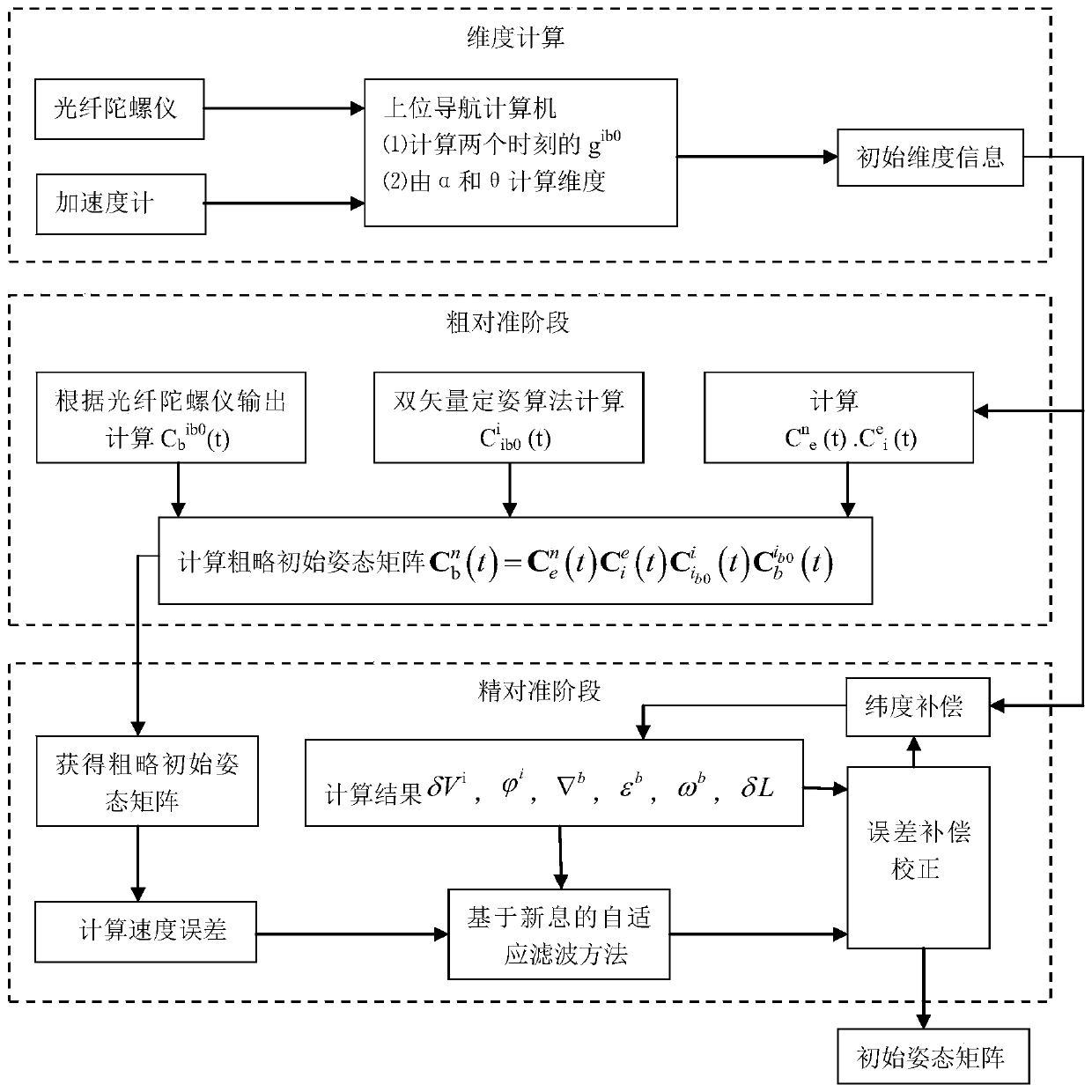
[0036] The following combined method flow figure 1 and strapdown inertial navigation system overall calculation figure 2 The specific implementation steps of the present invention are described in detail:
[0037]In the detailed description of the implementation steps below, the coordinate system is defined as follows: the earth coordinate system e system, the origin is selected from the center of the earth, the X axis is located in the equatorial plane, pointing from the center of the earth to the meridian of the point where the carrier is located, and the Z axis is along the direction of the earth's rotation axis, following the earth Rotation and rotation, X-axis, Y-axis and Z-axis constitute the right-handed coordinate system, which rotates with the rotation of the earth; the earth-centered inertial coordinate system i system is formed after the inertial solidification of the earth coordinate system e-system at the initial moment of rough alignment Coordinate system; navi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More