

Board turnover mechanism
A technology of turning plate mechanism and bottom plate, applied in the direction of manipulator, secondary processing of printed circuit, electrical components, etc., can solve the problems of high labor intensity, affecting the quality of PCB board, low work efficiency, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will now be further described in detail in conjunction with the accompanying drawings and embodiments. These drawings are all simplified schematic diagrams, only illustrating the basic structure of the present invention in a schematic manner, so it only shows the composition related to the present invention.
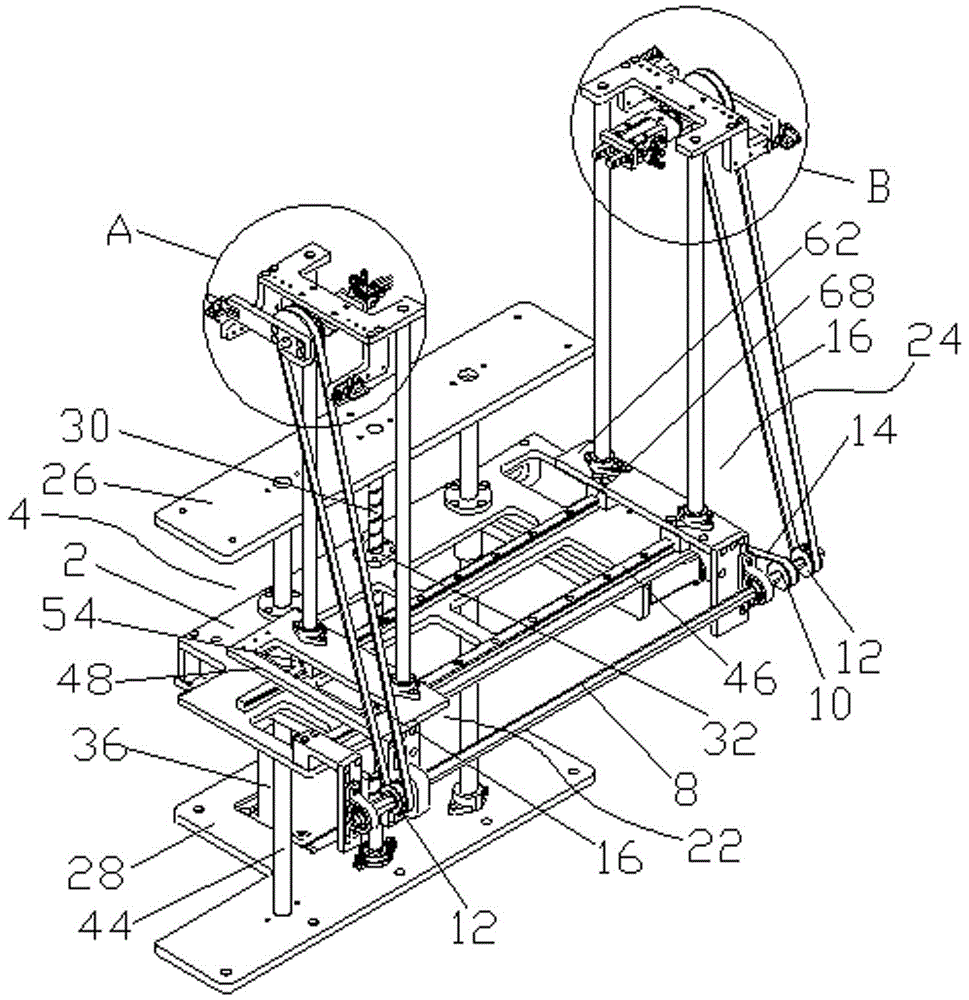
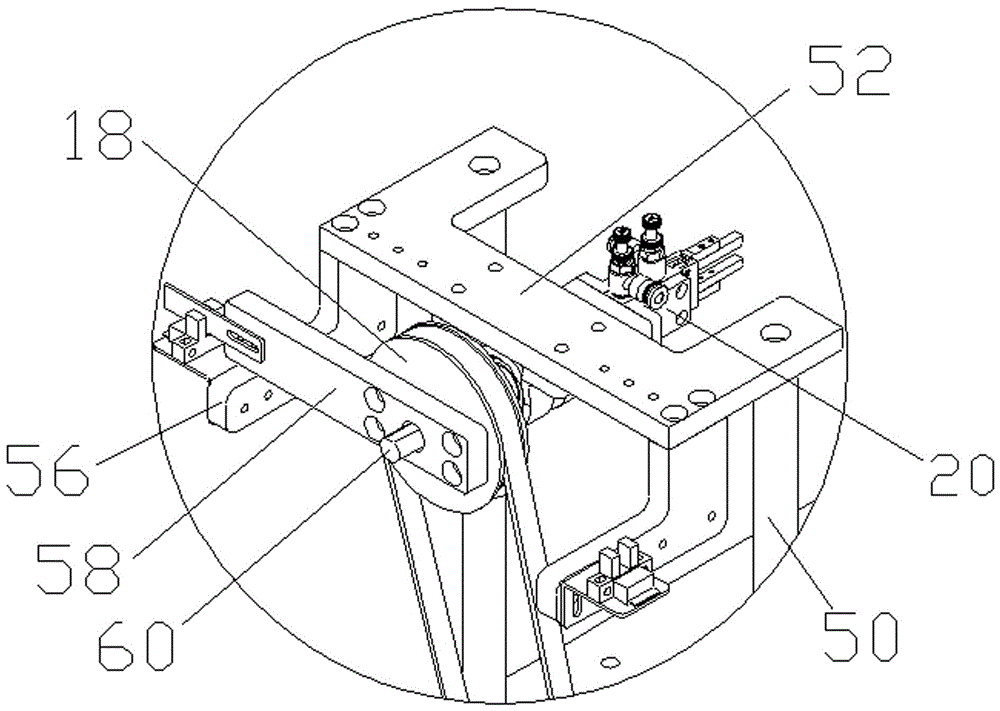
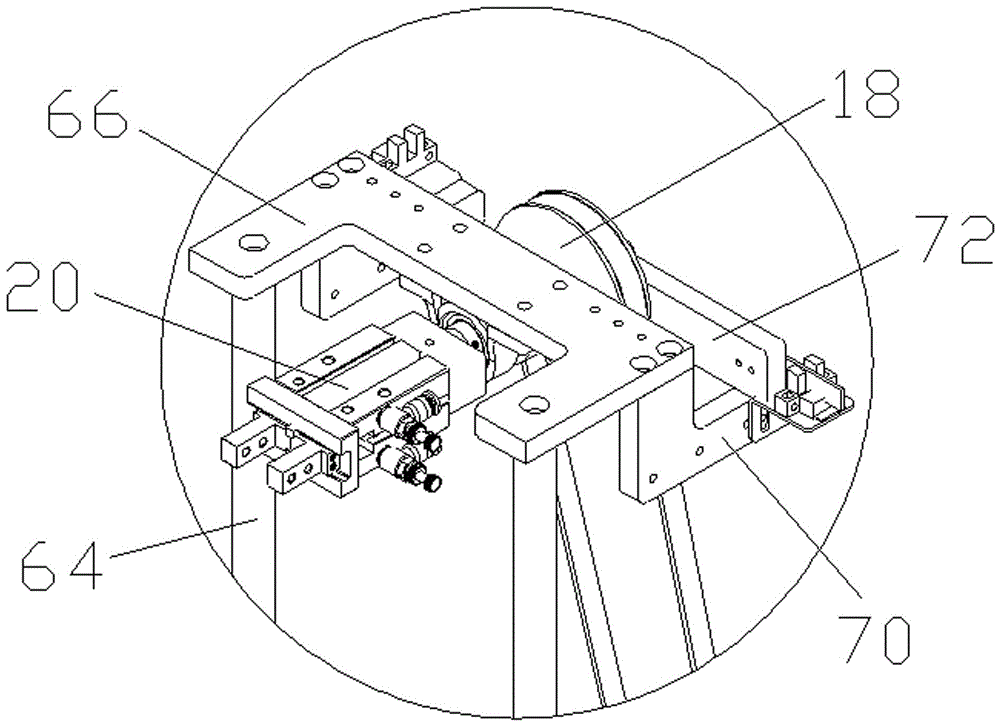
[0020] like Figure 1-Figure 6 As shown, a flap mechanism includes a support 2, a lifting assembly 4 that drives the support 2 to move up and down, a first motor 6, a cross bar 8 are installed on the support 2, and a drive wheel 10 is set on the cross bar 8. , two first driven pulleys 12, the first belt 14 is connected between the first motor 6 and the driving pulley 10, each first driven pulley 12 is connected with a second driven pulley 18 by a second belt 16, and the second driven pulley 18 is connected with the second driven pulley 18. The driving wheel 18 is equipped with a manipulator 20 , the support 2 is respectively equipped with a f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More