

A positioning and grasping mechanism of a manipulator
A grasping mechanism and manipulator technology, applied in the direction of manipulators, mechanical conveyors, conveyors, etc., can solve the problems of easily damaged product surfaces, difficulties in manual tearing, poor grasping stability, etc., to improve the grasping effect and applicability wide, impact reduction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
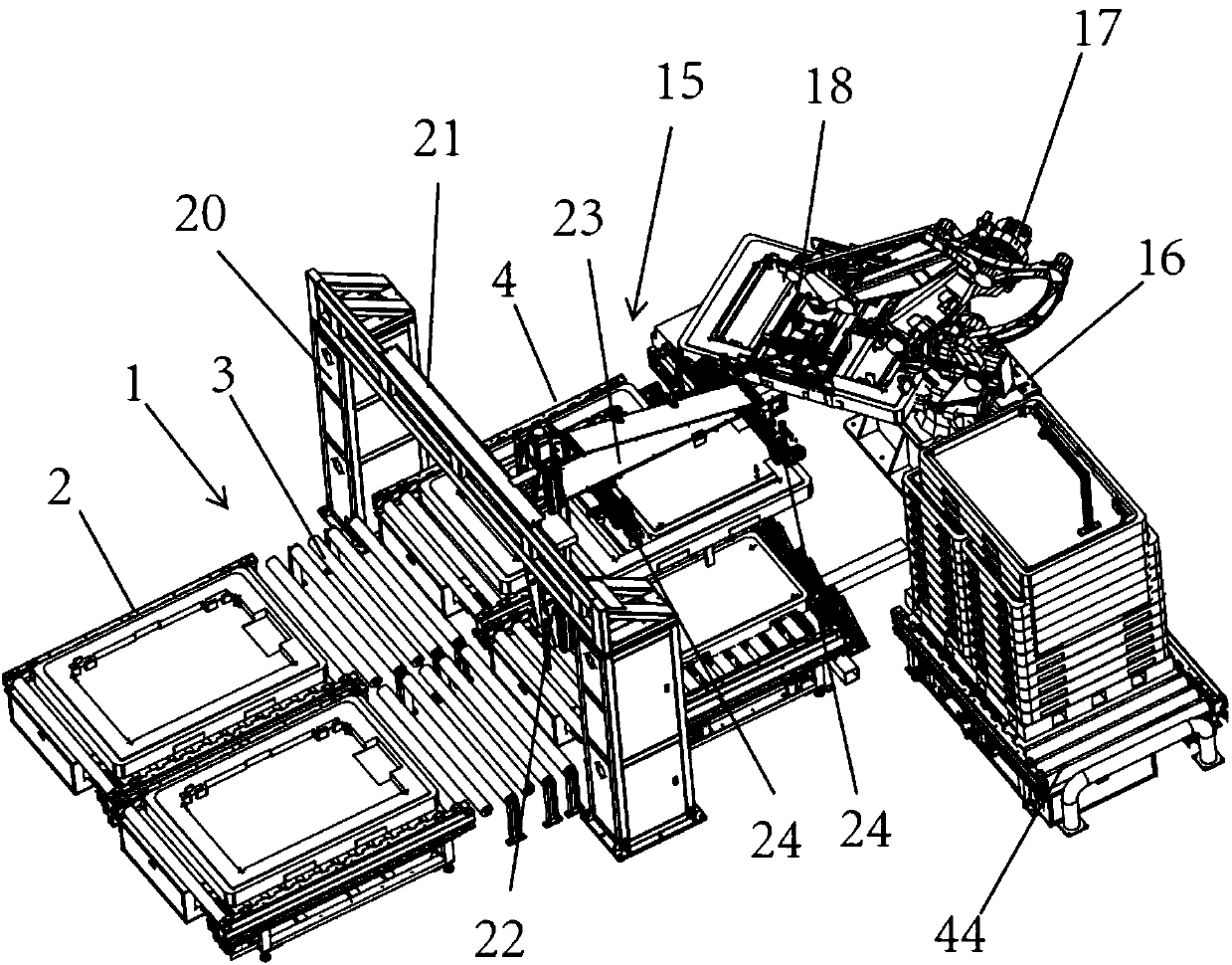
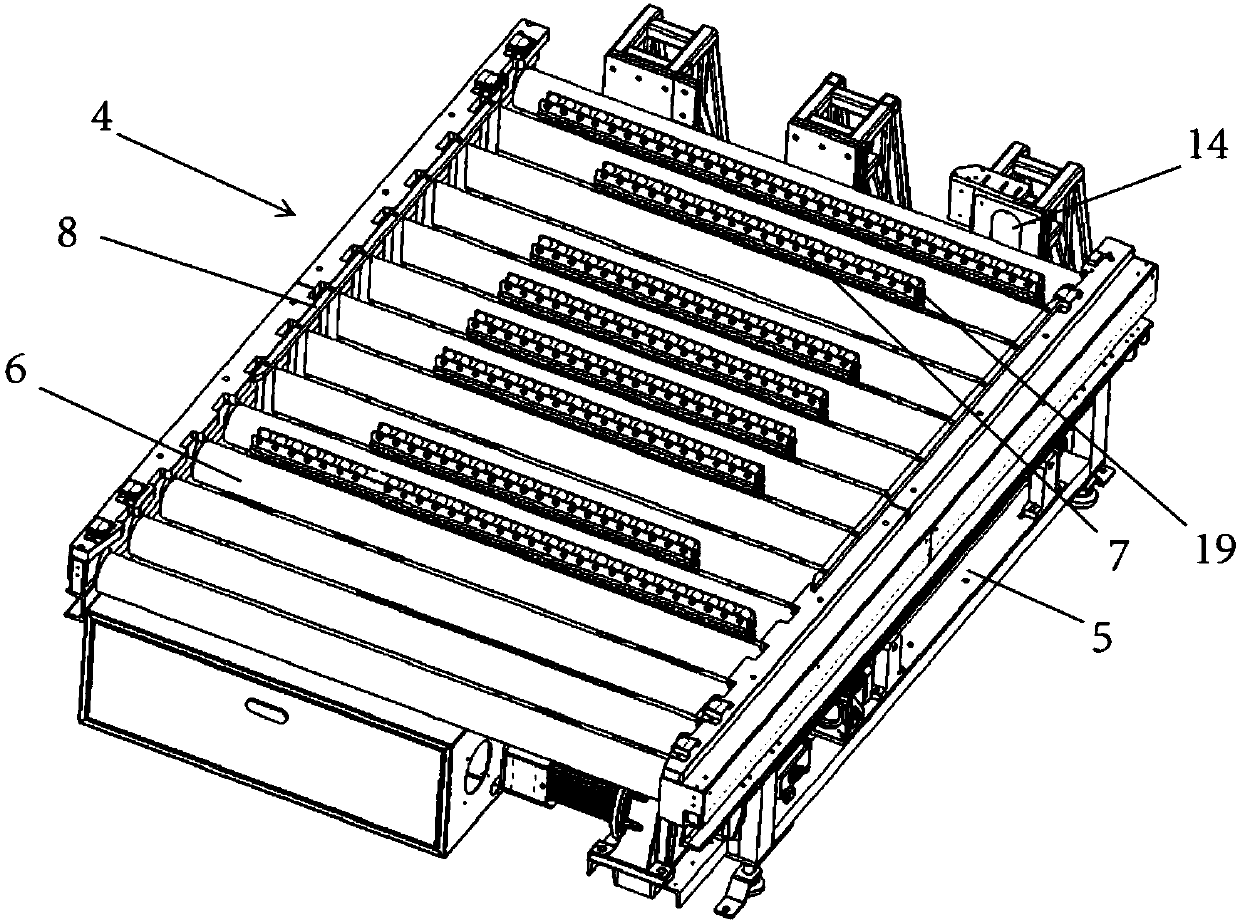
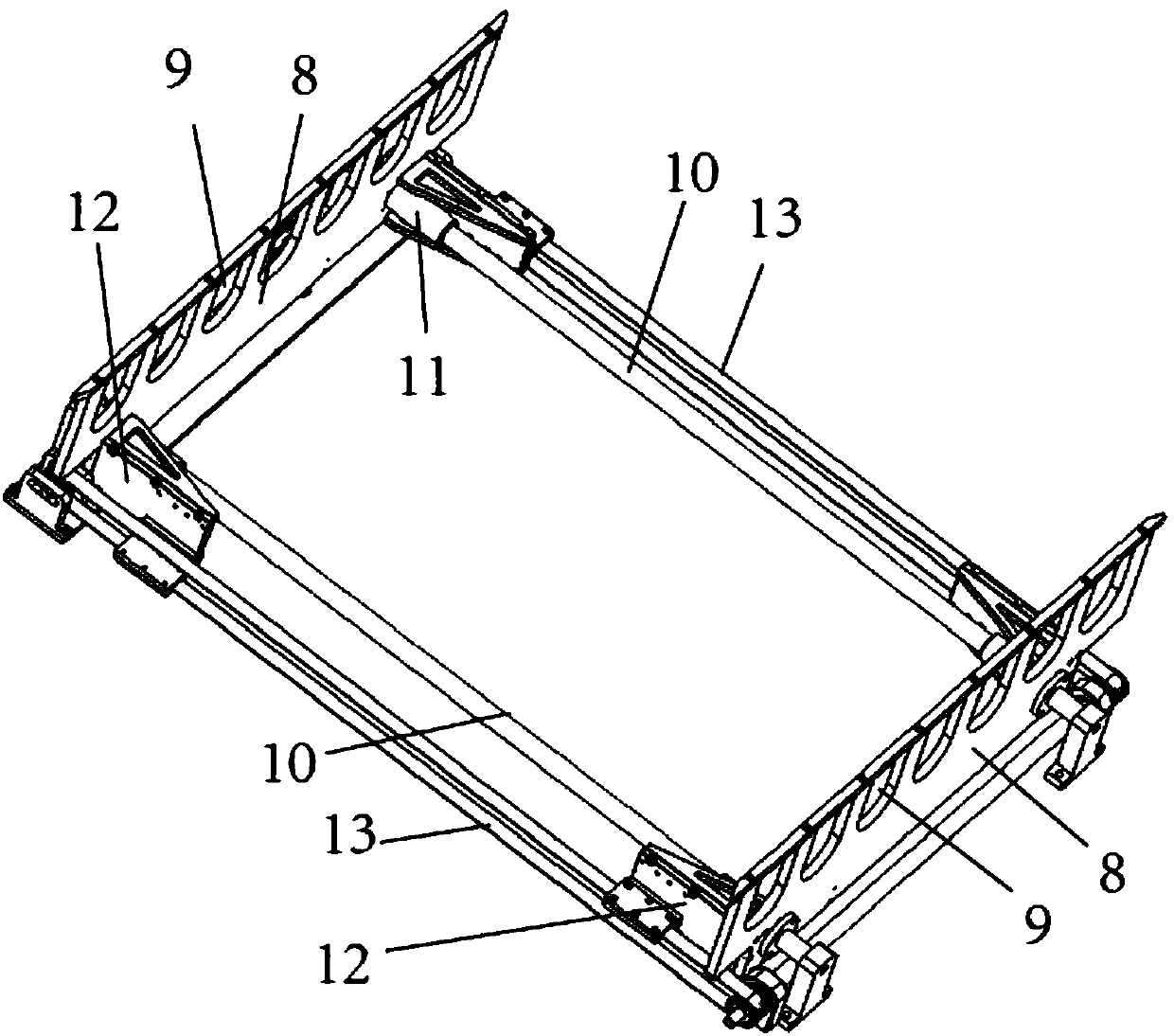
[0021] refer to Figure 1 to Figure 5 As shown, a manipulator positioning and grabbing mechanism includes a carrier conveying line 1, and the carrier conveying line includes a feed roller conveyor belt 2, a driven roller conveyor 3 and a positioning roller conveyor belt 4 arranged in sequence, and the positioning roller conveyor belt includes The support platform 5 is provided with several roller tables 6 on the surface of the support platform, and the roller table...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More