

Following type lower limb motion rehabilitation omnidirectional mobile robot
An omnidirectional movement and motion rehabilitation technology, applied in the field of rehabilitation robots, can solve the problems of reduced comfort, high processing and manufacturing costs, processing difficulty and cost reduction, etc., to improve safety, prevent secondary injuries, and meet the needs of use Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] Embodiments of the present invention will be described in detail below, and the embodiments described with reference to the accompanying drawings are exemplary and are only used to explain the present invention, and should not be construed as limiting the present invention.
[0049] Combine below Figure 1 to Figure 10 The omnidirectional mobile robot for follow-up lower limb motion rehabilitation according to the embodiment of the present invention is described in detail.
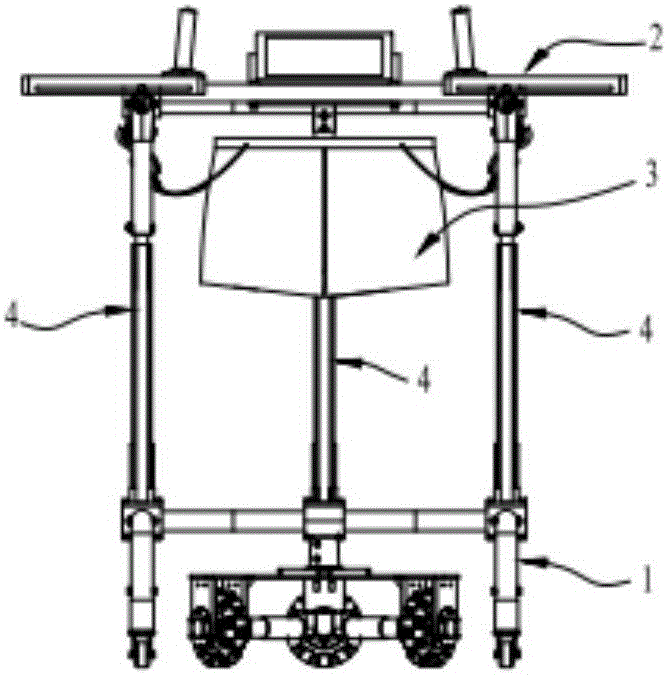
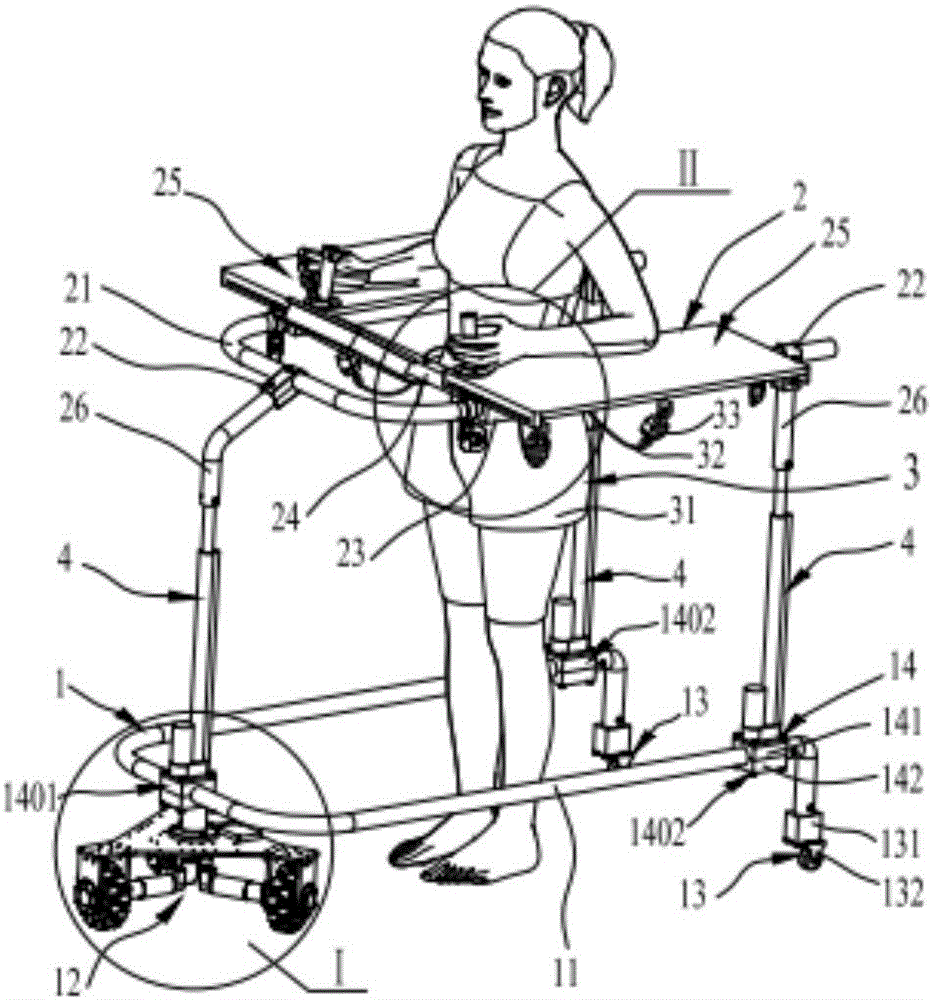
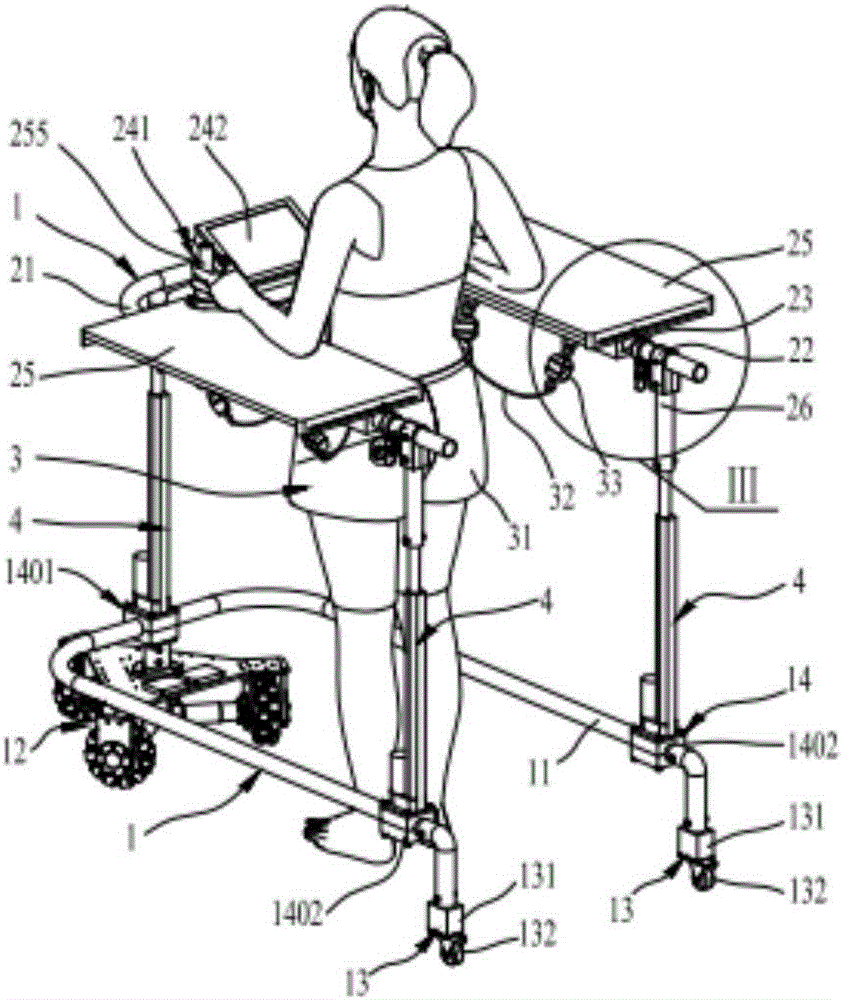
[0050] like figure 1 , figure 2 , image 3 As shown, the following omnidirectional mobile robot for lower limb motion rehabilitation includes: a U-shaped mobile chassis 1 , an upper U-shaped protective frame 2 , a fall protection device 3 and a telescopic support device 4 . The U-shaped mobile chassis 1 includes: a U-shaped chassis 11 , an omnidirectional mobile chassis 12 , and a universal wheel assembly 13 . The omnidirectional mobile chassis 12 is connected to the lower part of the front end...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More