

Control method for four-wheel independent steering vehicle
A four-wheel independent steering and control method technology, which is applied to automatic steering control components, steering mechanisms, steering rods, etc., can solve the problem of vehicle stability reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
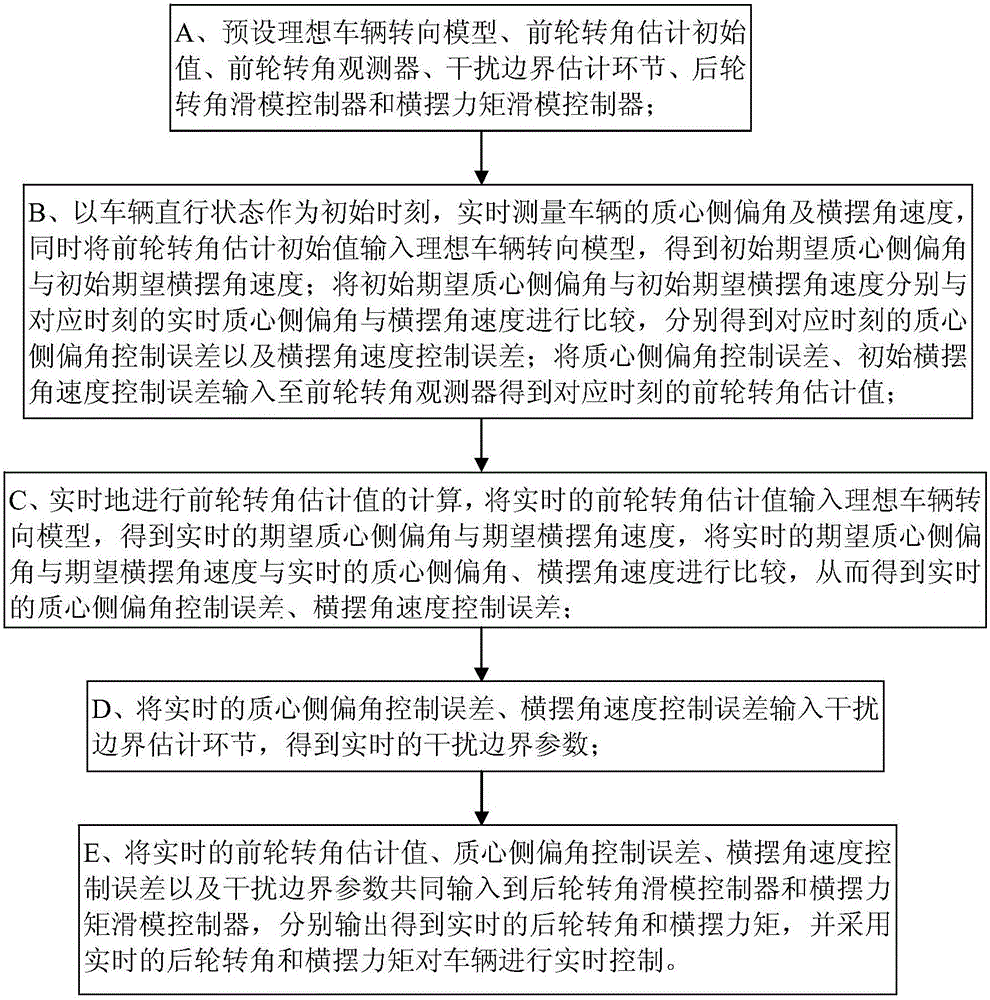
[0109] like figure 1 As shown, the control method of the four-wheel independent steering vehicle provided in this embodiment includes the following steps:
[0110] A. Preset the ideal vehicle steering model, the initial value of the front wheel angle estimation, the front wheel angle observer, the interference boundary estimation link, the rear wheel angle sliding mode controller and the yaw moment sliding mode controller;
[0111] The construction process of the ideal vehicle steering model is as follows:
[0112] The vehicle steering kinematics model is established as follows:
[0113] m ( v · x - v y γ ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More