

Control method of four-wheel independent steering vehicle
A control method and vehicle technology, which is applied to automatic steering control components, steering mechanisms, steering rods, etc., and can solve problems such as weak steering stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
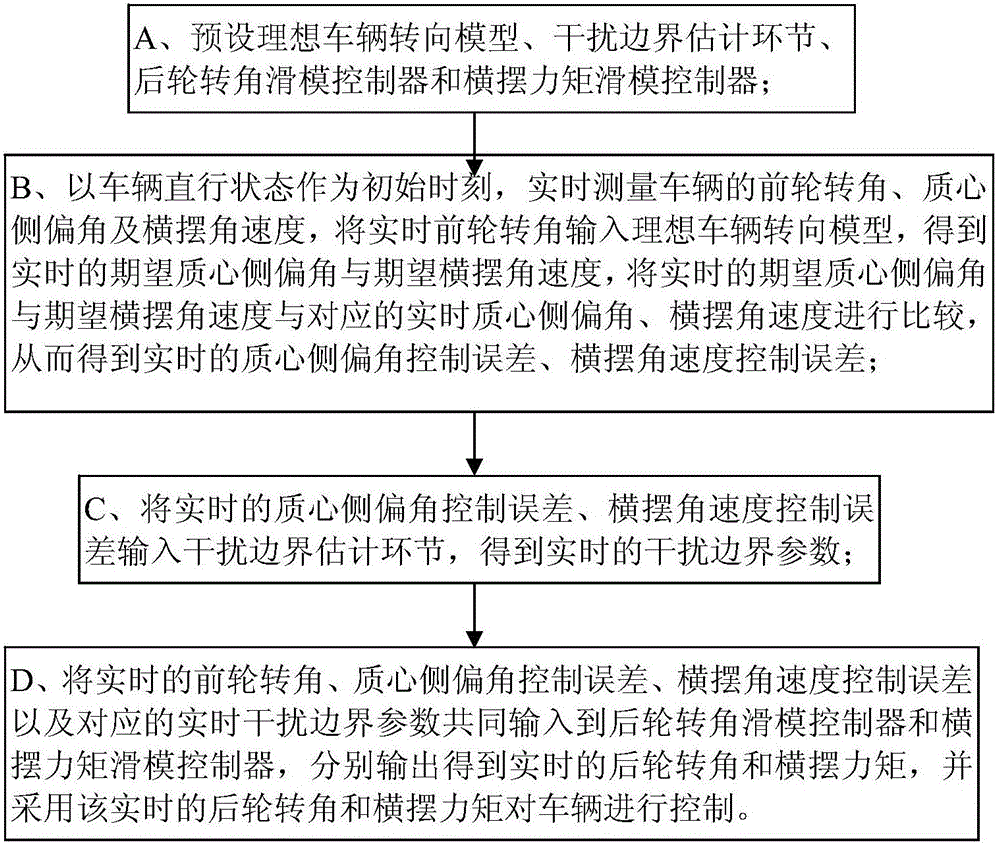
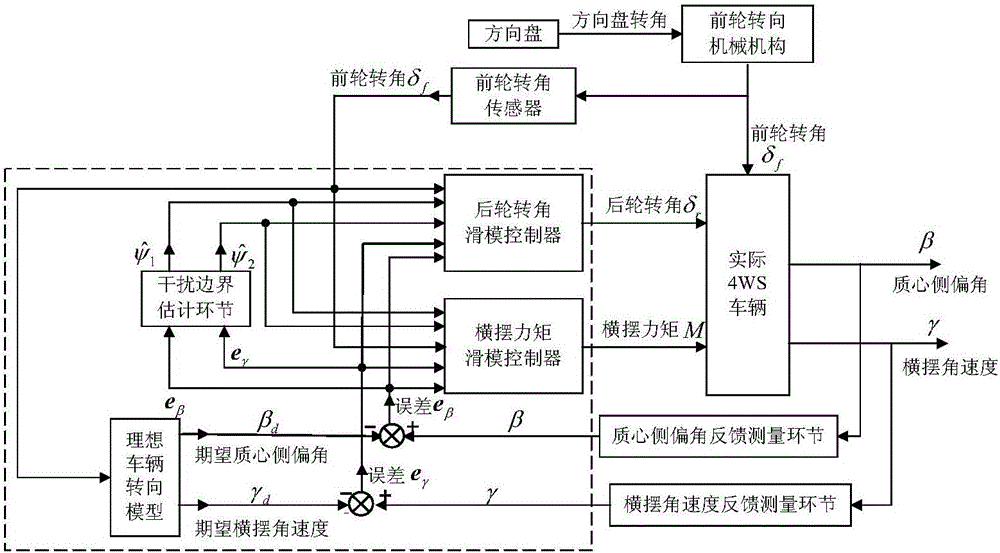
[0085] like figure 1 As shown, the control method of the four-wheel independent steering vehicle provided in this embodiment includes the following steps:
[0086] A. Preset ideal vehicle steering model, interference boundary estimation link, rear wheel angle sliding mode controller and yaw moment sliding mode controller;
[0087] The construction process of the ideal vehicle steering model is as follows:
[0088] The vehicle steering kinematics model is established as follows:
[0089] m ( v · x - v y γ ) = ( ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More