

Planet landing obstacle avoidance control method based on collision probability
A technology of collision probability and obstacles, applied in the field of deep space exploration, to achieve the effect of improving effectiveness and improving robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
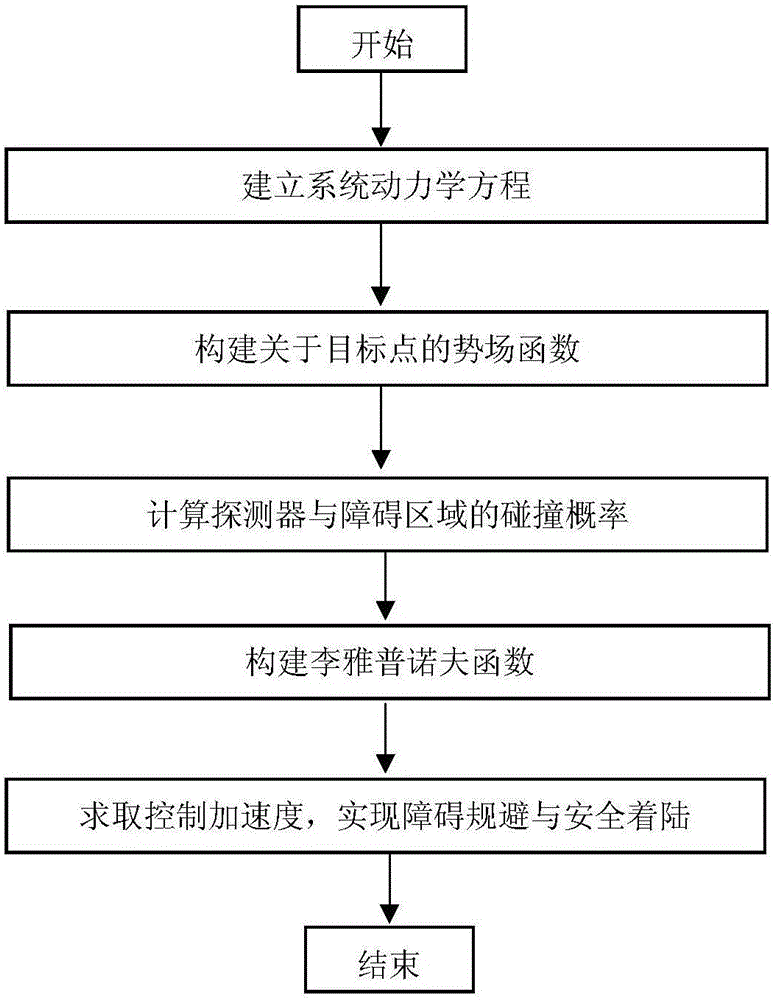
[0050] This embodiment discloses a planetary landing obstacle avoidance control method based on the collision probability. Taking the small celestial body landing obstacle avoidance control as an example, the implementation method of this embodiment includes the following steps, as follows: figure 1 Shown:
[0051] Step 1: Establish the system dynamics equation.
[0052] Establish the dynamic equation of the detector under the fixed coordinate system of the landing point:
[0053] r · = v v · = g - 2 ω × v - ω × ω × r + ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More