

Unmanned aerial vehicle pesticide spray path planning system and unmanned aerial vehicle pesticide spray path planning method
A technology for path planning and pesticide spraying, applied in instruments, data processing applications, forecasting, etc., can solve the problems of uneven operation, unexecuted, repeated regional execution, etc., to avoid repeated operation, uniform operation, and efficient use of pesticides Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
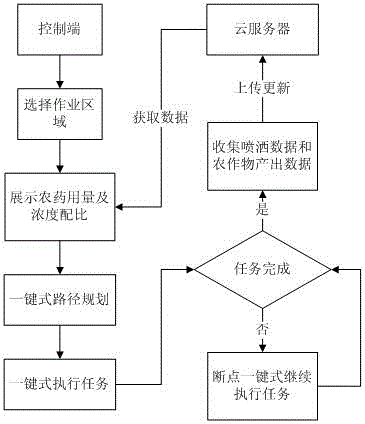
[0046] like figure 1 As shown, a UAV pesticide spraying path planning system, including a control terminal, a cloud server, a delineated task area module, a dose ratio module, a path planning module, a data collection module and a task execution module;
[0047] The control terminal mainly releases the unmanned aerial vehicle flight task;
[0048] The delineated task area module is mainly to limit the pesticide spraying area according to the released tasks;
[0049] The dosage proportioning module is mainly to proportion the dosage solution according to the types of crops in the task area, their location and growth conditions;
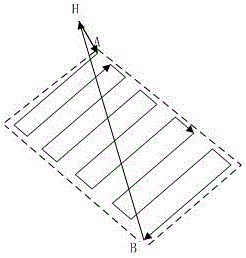
[0050] The path planning module is mainly to calculate the best route for the unmanned aerial vehicle to perfor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More