

Snake-like amphibious robot provided with modular joints
A technology of modular joints and robots, which is applied in the field of robots, can solve problems such as complex structures, poor stability and reliability, and insufficient flexibility, and achieve the effects of solving complex structures, ensuring stability, and reducing production costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0041] Example 1: Reference Figure 1-10 .
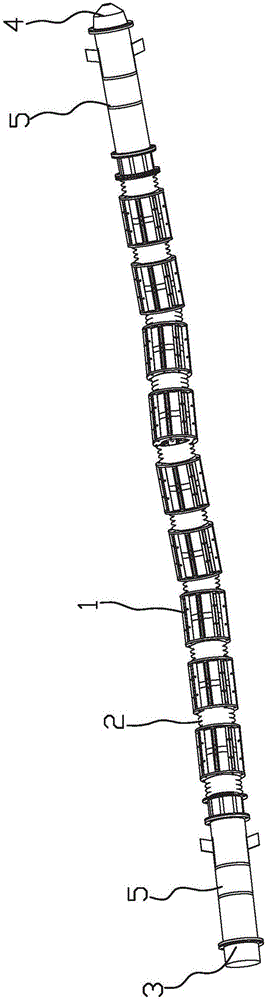
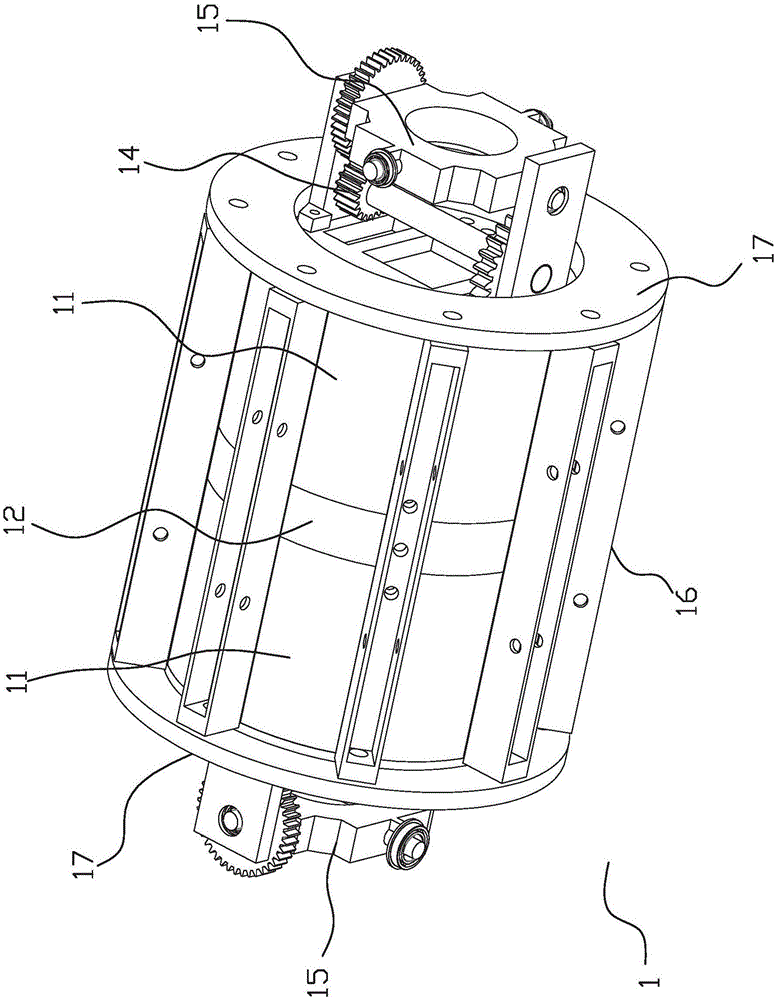
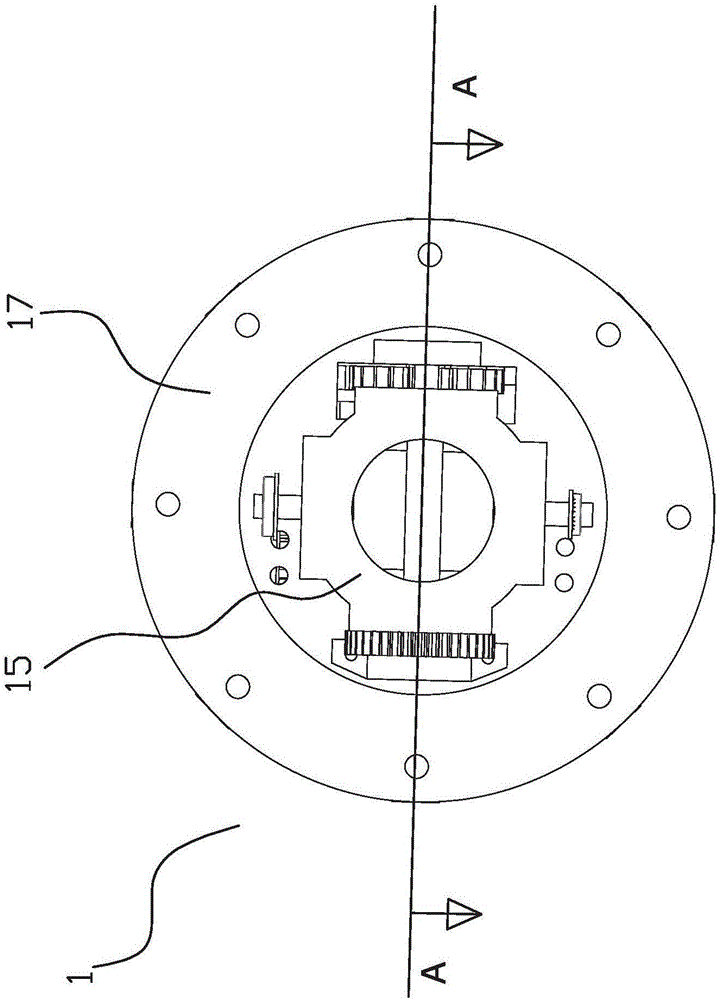
[0042] Specific reference Figure 1-5 , A snake-shaped amphibious robot with modular joints, comprising a plurality of universal modules 1 connected end to end in series, and the first universal module 1 and the last universal module 1 of the snake-like amphibious robot are respectively A head protective shell 3 and a tail protective shell 4 are provided. In this embodiment, the head protective shell 3 is cylindrical, and the tail protective shell 4 is conical. In the actual implementation of the present invention, the implementer can Choose the appropriate shape of the first protective shell 3 and the rear protective shell 4 according to the implementation conditions. A retractable waterproof corrugated sheath 2 is provided between the two adjacent universal modules 1, and the two ends of the waterproof corrugated sheath 2 are connected At the corresponding ends of the two adjacent universal modules 1, the waterproof corrugated sheath...
Embodiment 2
[0071] Example 2: Reference Figure 11-13 .
[0072] This embodiment is basically the same as Embodiment 1, and the difference lies in:
[0073] In this embodiment, the telescopic driving mechanism is a driving motor 57, and the telescopic connecting rod is a positive and negative threaded connecting rod 58 driven by the driving motor 57.
[0074] Preferably, the central position of the two connecting seats 52 is provided with a threaded hole for matching with the positive and negative threaded connecting rod 58, and the intersection of the positive and negative threads of the positive and negative threaded connecting rod 58 is located at the center of the two connecting seats 52 At the midpoint of the line.
[0075] In this embodiment, the driving motor is a threaded motor. When the driving motor 57 rotates in the forward direction, it drives the positive and negative threaded connecting rod 58 connected to it to rotate, and the rotation direction is the same as that of the driving ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More