

High-precision moving robot positioning system and method
A mobile robot and positioning system technology, applied to instruments, navigation through speed/acceleration measurement, and measurement devices, can solve problems such as gyroscope zero drift, insufficient real-time control of two-dimensional codes, hidden dangers of encoder indirect measurement, etc., to achieve The effect of improving navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
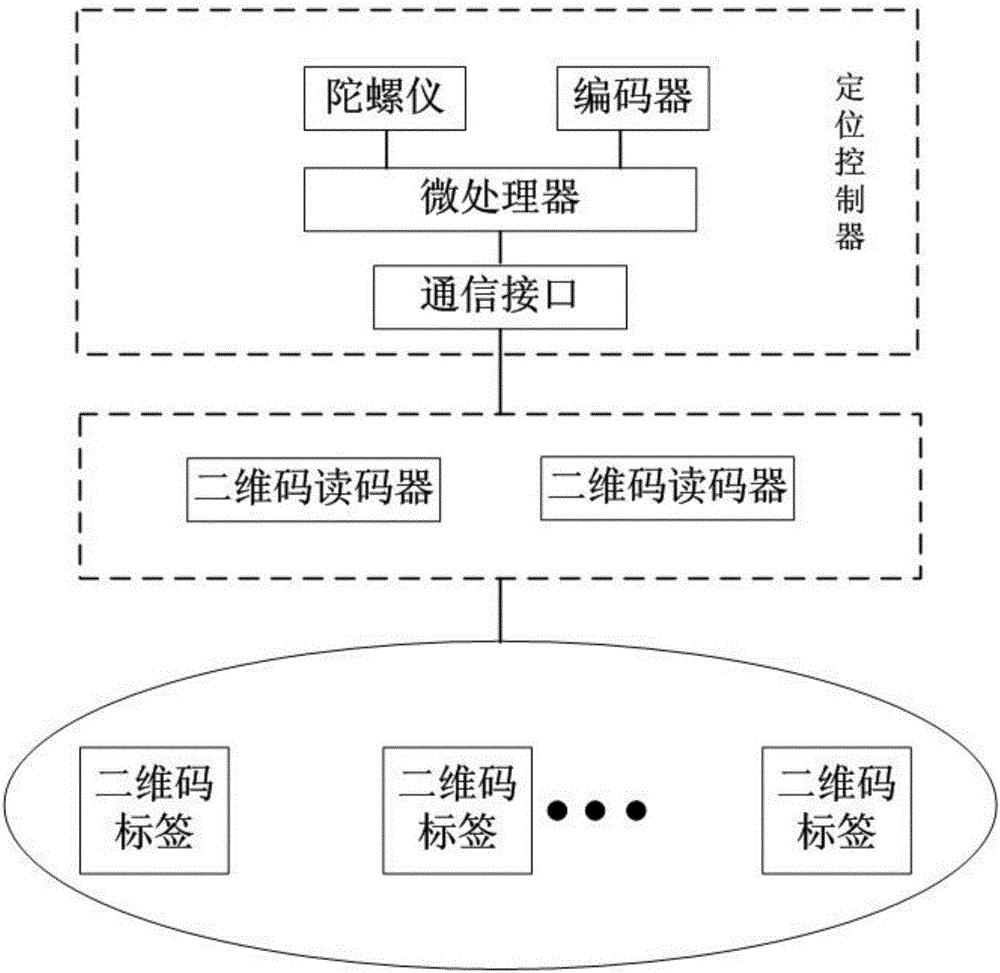
[0040] A high-precision mobile robot positioning system, such as figure 1 As shown, it includes a positioning controller installed on a mobile robot (AGV), a two-dimensional code reader and two-dimensional code labels distributed in an indoor environment. The positioning controller is composed of a microprocessor, an encoder, a gyroscope and The communication interface is connected, and the communication interface is connected with the two-dimensional code reader. The microprocessor reads the angle data through the encoder and the gyroscope, reads the two-dimensional code image through the two-dimensional code reader and performs calculation to realize the precise positioning function. The two-dimensional code label can be a single two-dimensional code label, or a two-dimensional code array label composed of two-dimensional codes, and there are on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More