

Industrial robot intelligent driving system
A technology of industrial robots and drive systems, applied in manipulators, manufacturing tools, electronic commutators, etc., can solve problems such as poor following characteristics and large starting torque-to-inertia ratio, and achieve the effect of improving followability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
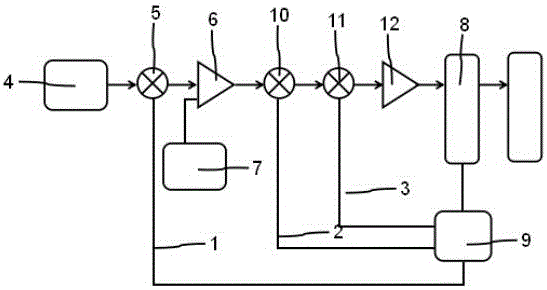
[0019] This embodiment: as figure 1 As shown, an industrial robot intelligent drive system includes a position closed-loop control subsystem 1, a speed closed-loop control subsystem 2, and a torque closed-loop control subsystem 3. The closed-loop control subsystem includes a position given module 4, a position comparison PID An adjustment module 5, a position limitation module 6, a position limitation given module 7, a motor execution module 8, and a sensor feedback module 9. The speed closed-loop control subsystem 2 includes a speed comparison PID adjustment module 10, a motor execution module 8, and a sensor feedback module 9. The torque closed-loop control subsystem 3 includes a current comparison PID adjustment module 11, a motor execution module 8, and a sensor feedback module 9;
[0020] The output of the position given module 4 is connected to the given end of the position comparison PID adjustment module 5, and the output of the position comparison PID adjustment modul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More