Electrical device
A technology of electrical equipment and determination unit, applied in lighting and heating equipment, air heaters, separation methods, etc., can solve the problems of insufficient energy-saving effect and long time, and achieve the effect of excellent performance and high energy-saving effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
[0055] The following is based on Figure 1 to Figure 7 (b) One embodiment of the present invention will be described.
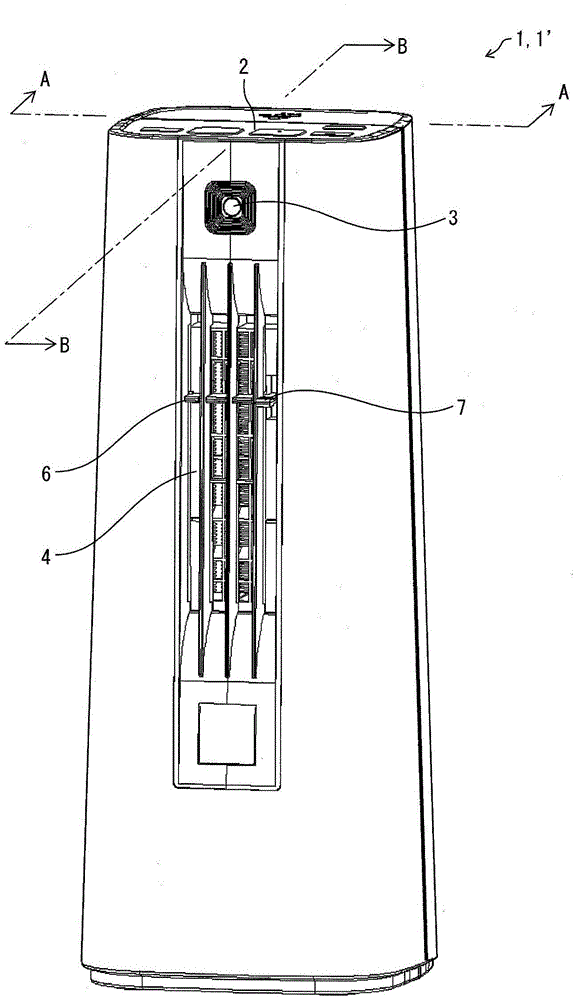
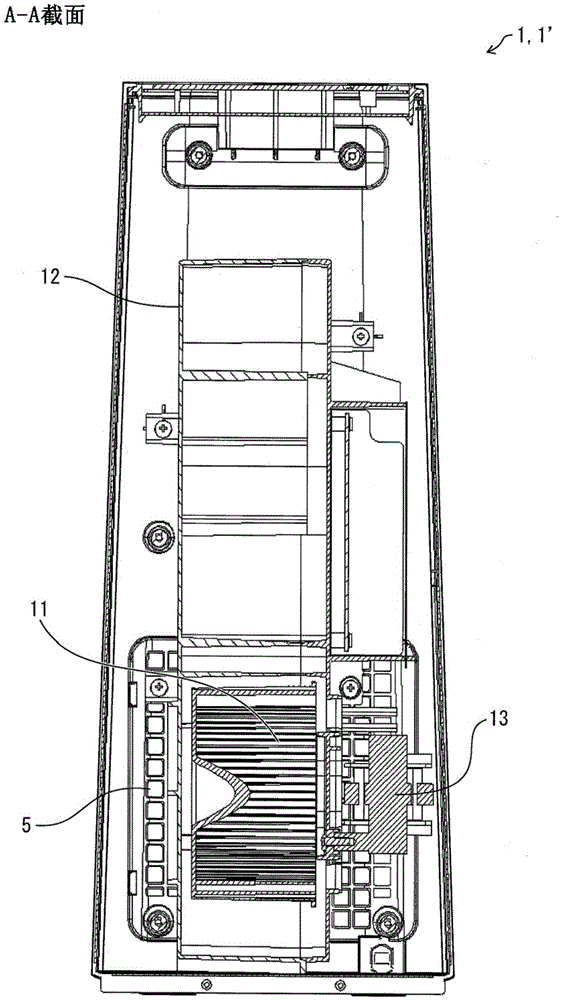
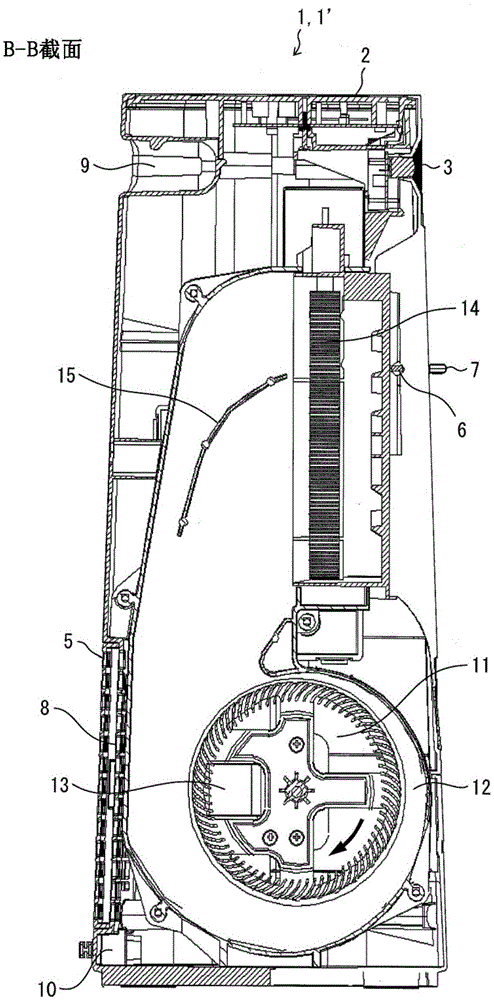
[0056] figure 1 It is an external appearance perspective view of the heater 1 which is the electric equipment which concerns on 1st Embodiment of this invention. figure 2 yes figure 1 The A-A line view section view. image 3 yes figure 1 The BB line view section view.
[0057] Such as Figure 1 to Figure 3 As shown, the heater 1 has an operating part 2 on the upper surface of the main body, a human sensor 3 and an air outlet 4 on the front of the main body, and a suction port 5 on the back of the main body. The operation unit 2 includes, for example, a switch for switching operation content such as blower operation or heating operation, a switch for switching operation intensity such as strong operation or weak operation, and the like. The human sensor 3 is located at the upper part of the front of the main body, and detects a human body to output ...
Embodiment approach 2
[0098] The following is based on Figure 8 ~ Figure 10 Other embodiments of the present invention will be described. In addition, for the convenience of description, the same reference numerals are assigned to components having the same functions as those described in the above-mentioned embodiments, and description thereof will be omitted.
[0099] Figure 8 It is a block diagram showing the configuration of each element of the air heater 1' according to the second embodiment. A passing judgment unit 36 is added to the human body detection control unit 30' of the air heater 1'.
[0100] The passing determination unit 36 determines that a person has passed by when a person is detected based on the detection signal only within a few seconds (the second predetermined time) within the last 8 seconds of the determination time T0. When passing is judged by the passing judgment unit 36, the operation time determination unit 34′ determines the operation ON time (absence determ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com