

System and method for generating lane-level navigation map of unmanned vehicle
An unmanned vehicle and navigation map technology, which is applied in the field of the generation system of the lane-level high-precision navigation map of the unmanned vehicle, can solve the problems of limited field of view, insufficient globalization, deviation of the map base map, etc., and achieves wide applicability. , the map data is detailed and rich, and the effect of a wide range of applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0037]The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
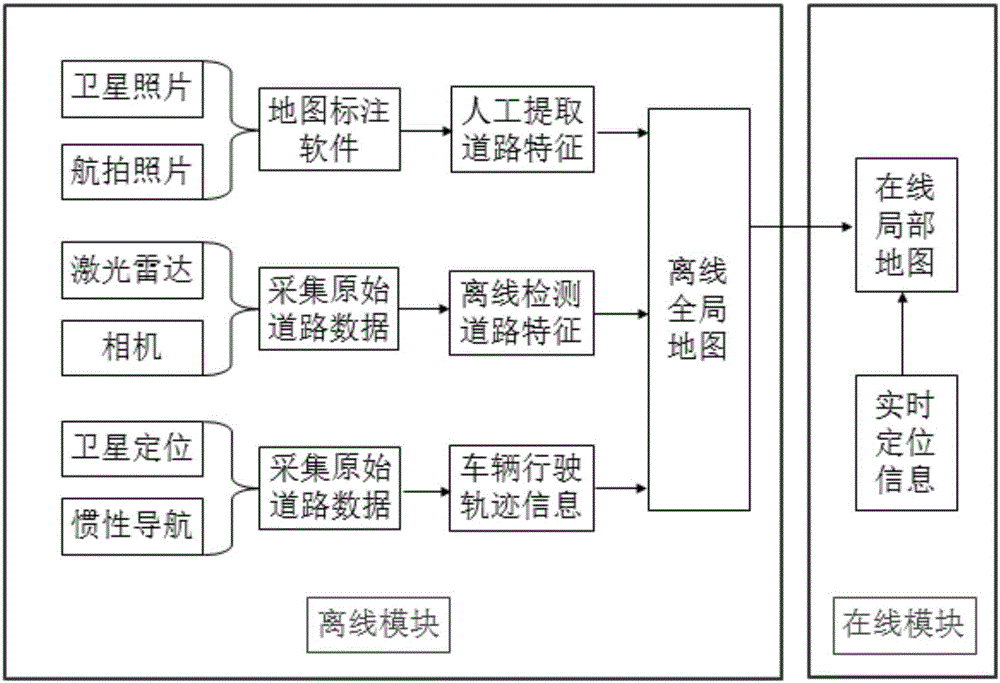
[0038] A system for generating lane-level navigation maps for unmanned vehicles, such as figure 1 shown, including:
[0039] The offline module uses a variety of data collection methods to obtain the original road data in the target area of the unmanned vehicle, and after offline processing, extracts a variety of road information, and then fuses the extracted results to generate an offline global map;
[0040] In the online module, during the automatic driving process of the vehicle in the targe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More