

Environment modeling method based on recursive reduced visibility graph
A modeling method and environment technology, applied in two-dimensional position/channel control, non-electric variable control, instruments, etc., can solve problems such as erroneously simplifying obstacles, and achieve the effect of reducing the number and improving the execution efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with accompanying drawing.
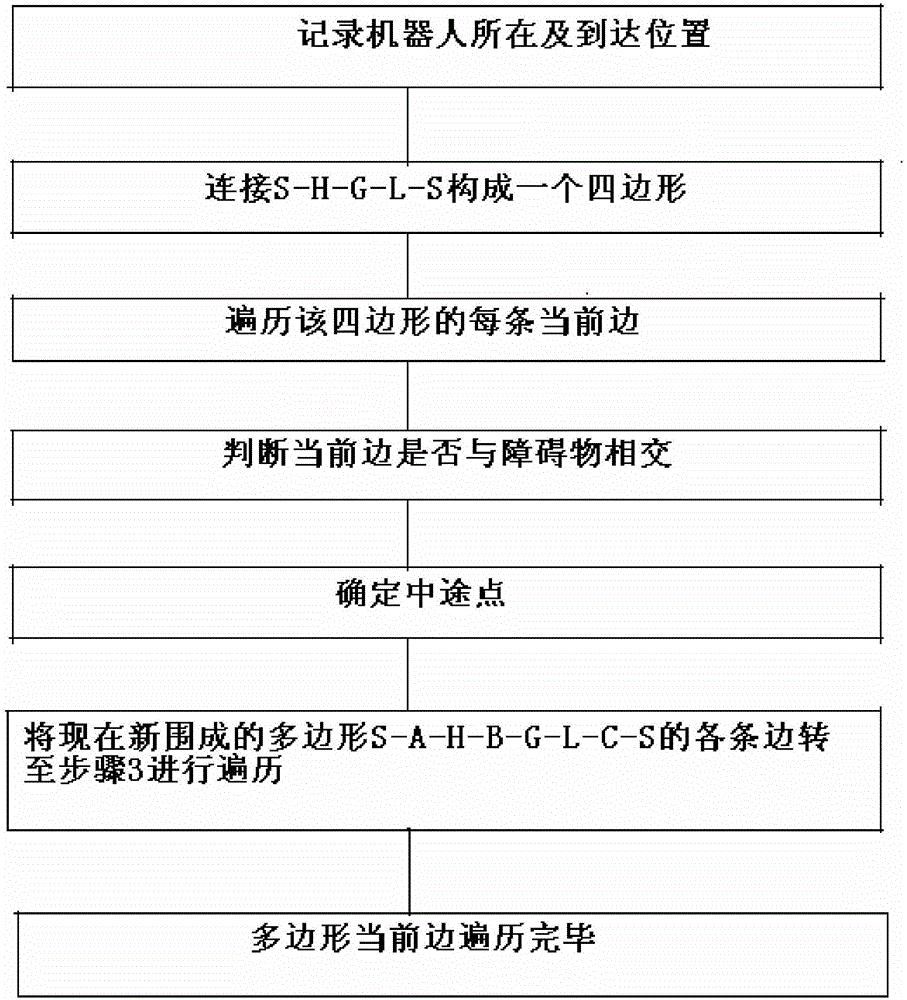
[0021] Such as figure 1 As shown, an environment modeling method based on recursively simplified visual graphs includes the following steps:
[0022] Step 1. Record the location and arrival position of the robot, record the location of the robot as point S, and record the expected arrival position as point G, and then use the computer to scan the entire map environment where the robot is located, and use a closed polygon to map each Obstacles are enveloped and these polygons are preserved;
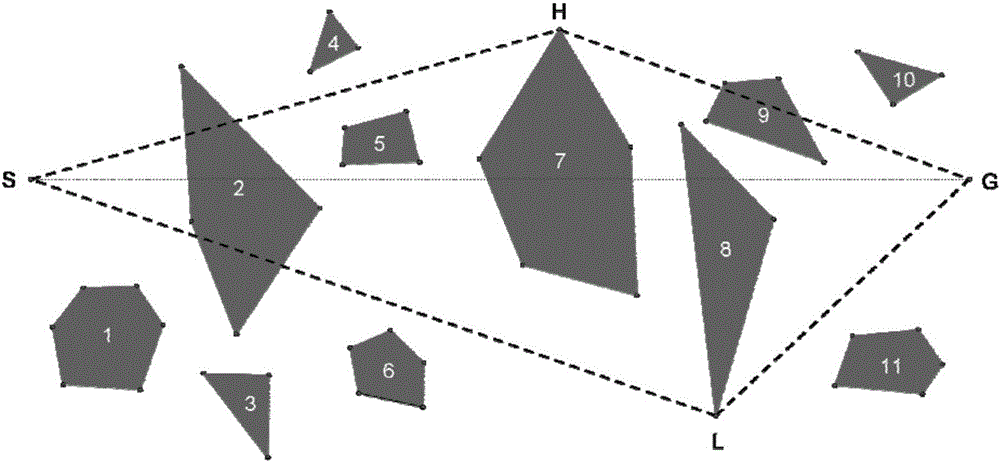
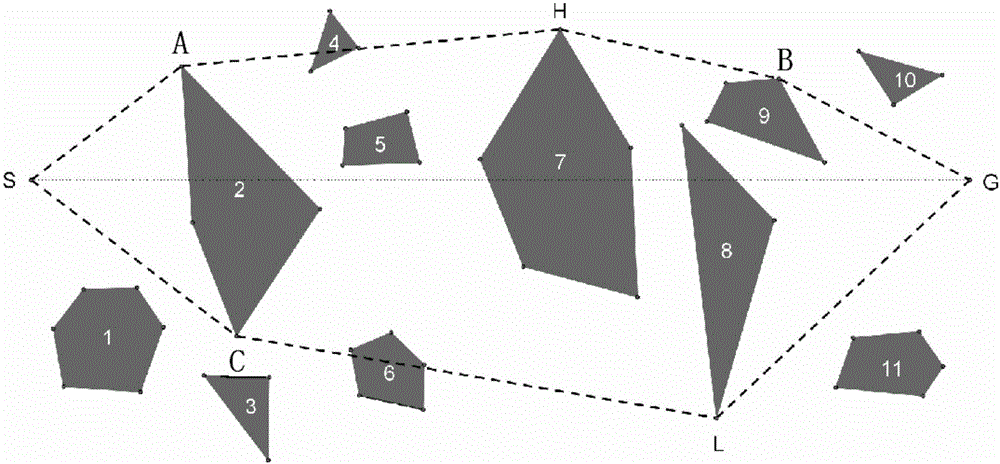
[0023] Step 2. Connect S-H-G-L-S to form a quadrilateral, connect point S and point G, and the line segment SG is called the robot crossing line. At this time, the crossing line SG will intersect with multiple obstacle polygons, and record these intersecting obstacle polygons 2, 7, and 8 , and then find a point on both sides of the crossing line SG, which must meet the following two c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More